
Unified Articulated Assets · active
PAct hard-case OT + VLM exploration
Six OT/VLM variants on the hardest official non-PM samples, with strict scoring and 3D comparison.
这一页把同主题实验收在一起展示。排序仍然按秒级时间戳倒序,星标和筛选逻辑与首页一致。
Six OT/VLM variants on the hardest official non-PM samples, with strict scoring and 3D comparison.

Five Wikimedia Commons real-image examples processed by PAct; includes source images, coarse masks, object.json, FK-composed GLBs, and articulation videos.

Conservative PAct-Transporter postprocess artifacts with object_transporter_v01.json, diagnostics, simplified GLB comparisons, and raw-vs-v0.1 metrics.

Full substrate evaluation over the 6352-asset v1.0 final release: SDF parseability, mesh URI integrity, movable joints, sidecars, quality flags, category coverage, and PAct-output coverage annex.

在五创新评测基础上继续加入 bbox contact、pivot-to-surface、axis geometry 与同类别 PartNetMobility template retrieval。

离线实现 patch-to-part OT gate、edge/mask cost、part-node assignment、part-pair-to-joint transport、GW graph-template prior,并在 4 个 GT-complete PAct 样本上输出指标和 SVG/GLB 可视化。

PartNeXt static queries retrieved against the articulated template bank, with coarse geometry-axis overlays; no A-grade export yet.

Direct native articulated GT frame GLBs loaded through the same portal model-viewer chain for rendering sanity check.

Cached Particulate-generated articulated probes from HSSD static GLBs with animated playback controls.

Baseline PAct vs OT-gated post-process with JSON metrics and 3D GLB comparisons.

Cached Particulate animated GLB results with explicit play/time controls; AnyMesh part-conditioned configs retained.

PAct batch benchmark over 27 successful outputs; 5 GT-aligned samples; missing metrics marked not_computed.

Original PartNeXt/PartVerse face masks seed AnyMesh postprocess/joint estimation for static part assets.

PAct evaluated against all discovered PartNetMobility-ID-aligned outputs using expanded v0.3 articulated-object generation metrics.

Semantic articulatability triage for static HSSD assets plus Particulate evidence.

Particulate inference on HSSD GLBs plus readiness/blocker records for Articulate AnyMesh, Articulate Anything, URDF-Anything, and URDF-Anything+.

PAct evaluated against PartNetMobility aligned samples using expanded v0.3 articulated-object generation metrics.

从 Optimal Transport 数学基础讲到 SceneTransporter 的结构搬运思想,再落到 PAct 的 OT/GW loss、后处理和 benchmark 设计。

Full HSSD official model library and preprocessed index tested through SceneSmith HssdRetrievalServer/HssdRetriever with five returned GLB candidates.

PartNeXt/PartVerse pre-segmented assets converted to GEOPARD-style per-part point-cloud inputs; official GEOPARD inference is blocked by missing public code/checkpoints.

Live-ish progress snapshot for the resumable SceneSmith-preprocessed HSSD model download.

Official Particulate inference on selected PartNeXt and PartVerse static part-aware GLBs, with source, segmented-axis, animated GLB, and URDF downloads.

Expanded articulated-object generation benchmark based on availability, geometry, parts, kinematics, motion consistency, physics, scene usability, texture, semantics, and reproducibility.

Consolidated official-output dashboard for PhysX-Anything and PAct with interactive 3D artifacts and artifact-readiness coverage.

SceneSmith official Objaverse retrieval server/client smoke on UD4 PartNeXt/PartVerse static assets; 4 queries x 3 returned GLBs.

Official SceneSmith HSSD retrieval server/client smoke test with three returned GLB candidates and metric size metadata.

PAct official rerun2 on two Appendix-D inputs; exported object.json, part GLBs, FK-composed closed/mid/open GLBs, and videos.

HSSD preprocessed index/support-surfaces checked; full HSSD objects are gated/missing; PartNeXt static samples mounted; Particulate official foldingchair inference now runs and exports articulated GLB/URDF.

Five clean-official PAct examples with exported object.json, part GLBs, combined closed/mid/open GLBs, and official animation videos.
Clean official PAct rerun on Dishwasher_001 with exported object.json, part GLBs, combined closed/mid/open GLBs, and official animation videos.

Clean official PhysX-Anything demo/0 rerun with VLM, decoder, split, and simready outputs; no stale local outputs included.

Formal route-3 implementation has been switched to clean official PhysX-Anything and PAct repositories; stale local-modification outputs are deprecated.

PartNeXt root semantic classification: 19819 household-eligible mesh-backed records from 23229 local GLBs.

PartNeXt local full set has 23,229 GLBs; this page samples 12 different category folders as interactive raw static GLB previews.
3074 PartNeXt + PartVerse household-ish part-aware static assets in SceneSmith Objaverse-style format with real ViT-L text CLIP embeddings.

Official HSSD and ObjectThor/Objaverse setup audit: size threshold, /data/share search, small-sample direct loader check, and download decision.
每个 GAPartNet 类别抽一个样本;使用原始 URDF 运动树和 textured OBJ/MTL 导出 GLB,滑块切换 9 帧。

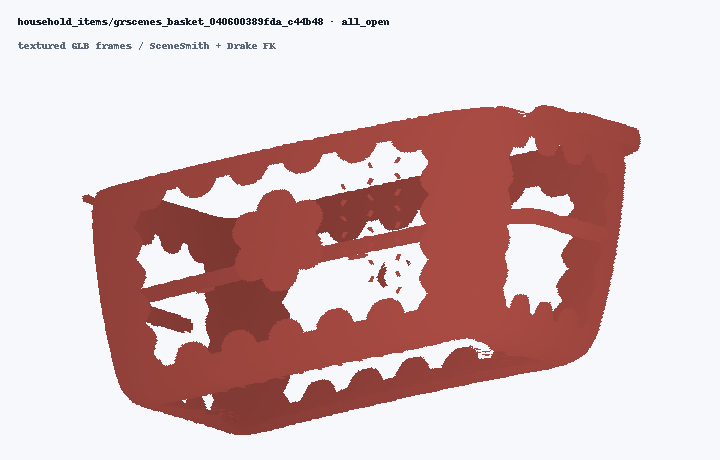
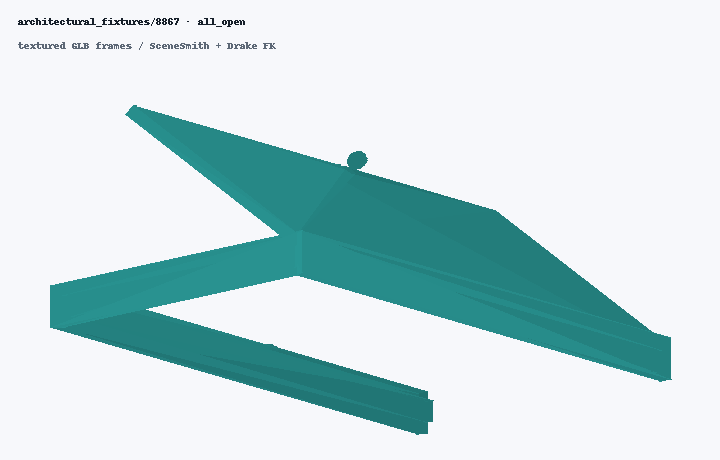
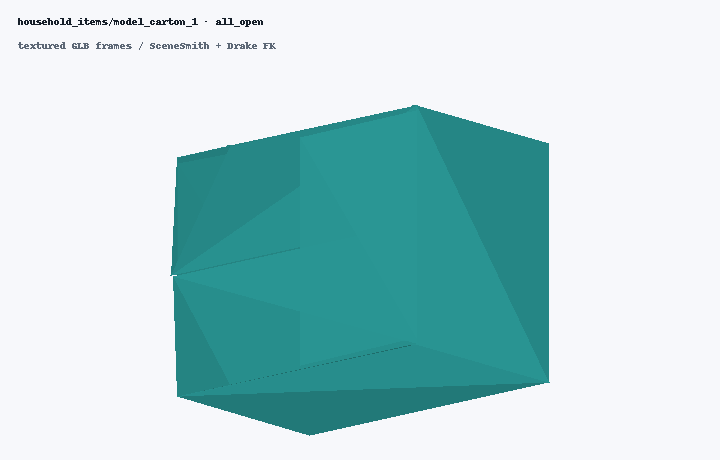
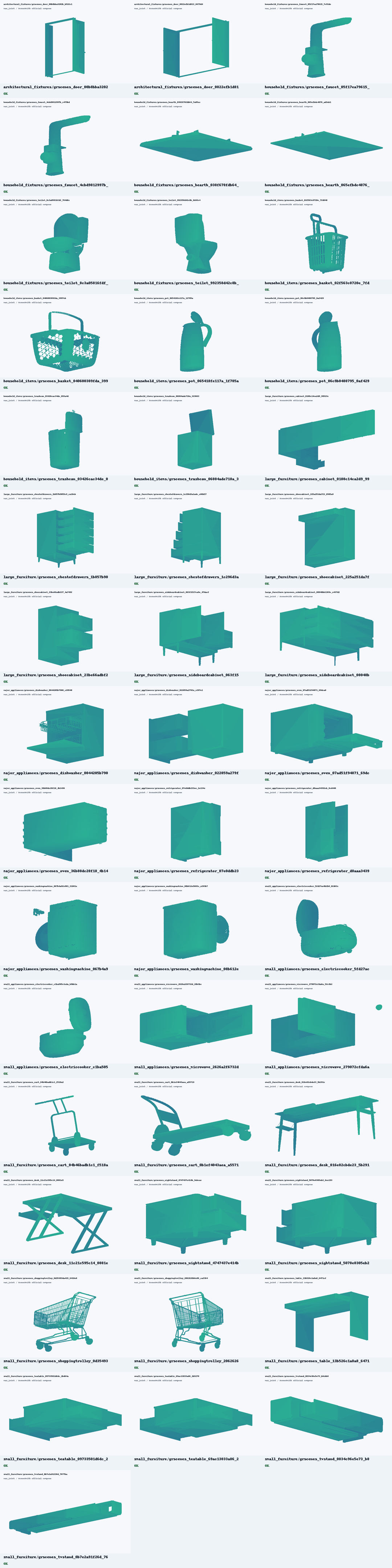
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
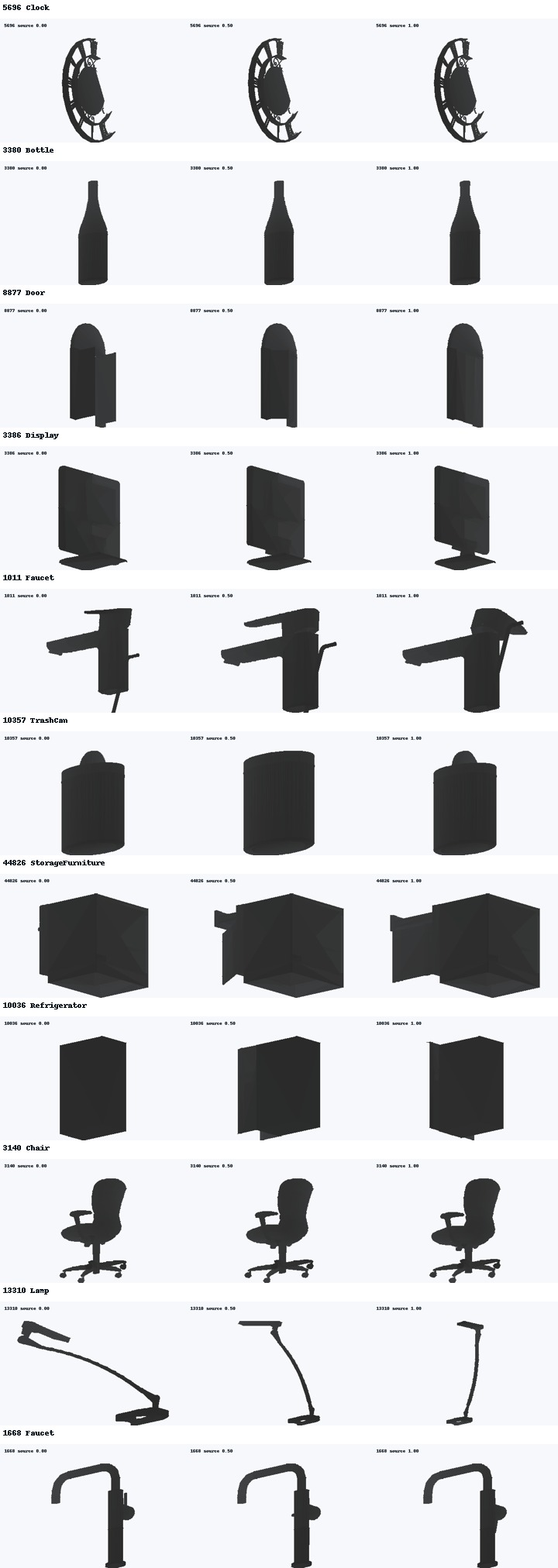
每个 PartNetMobility 类别抽一个可找到原始 mobility.urdf 的样本;使用 raw URDF source-faithful 导出,不走已知会错乱的 PM SDF diagnostic 预览链。
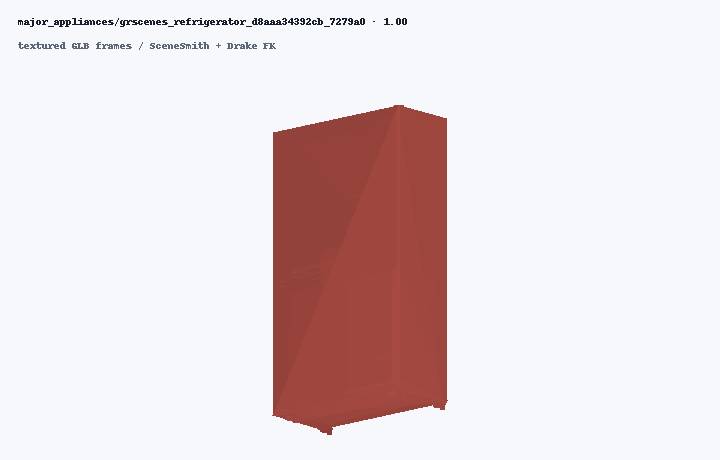
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.

Official SceneSmith articulated SDF render chain from compute_articulated_embeddings.py --keep-renders: zero-joint mesh combine plus Blender CLIP-view renders.
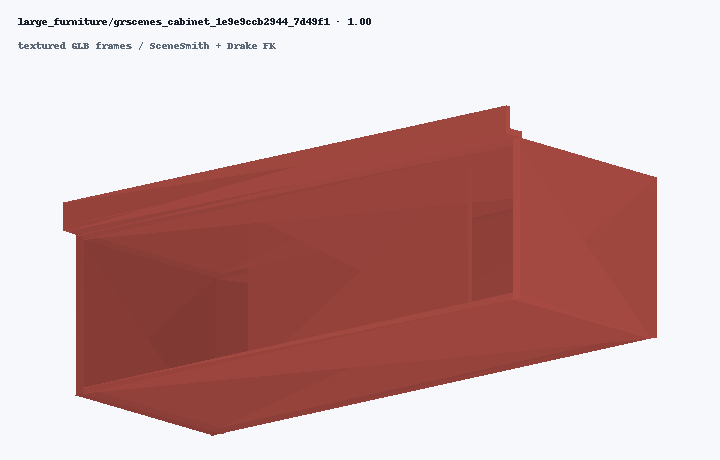
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.

Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Interactive 3D result models for route-3 method evaluation: method sample.glb with matched source GT state frames where available.

Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. PhysX-Anything finaljson outputs matched to PM/GAPartNet original raw URDF annotations for more complete structure and motion metrics.

Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Corrected benchmark entry: unified native assets as substrate, reproduced methods as evaluated systems, with in-the-wild outputs separated from leaderboard scores.

Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. Deprecated historical route-3 output generated before the clean official implementation switch. Do not use as formal result. 6352 native/manually cleaned articulated assets evaluated through the benchmark entry for SDF parse, mesh URI integrity, movable joints, bbox and sidecar signals.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
SceneSmith v0.4 unified articulated asset library direct-call QC: 6352 assets, official loader validated, cross-dataset joint-slider visual check.
Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.
Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.
Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.

Fixed rerun of the exact 9 diagnostic failure samples. Basket_20 uses coupled ArtVIP route; EKET uses direct SDF-frame export; GRScenes samples with raw USD physics:jointEnabled=False are shown closed-only; PM uses raw URDF-tree export. Original failure page remains visible.

Diagnostic page, not a passed release preview. These are the exact cross-dataset samples where the SDF/FK preview exposed detached parts or wrong joints; keep them visible as regression cases until the root conversion/display bug is fixed.

Curated cross-dataset preview using only previously validated/fixed exports: ArtVIP repaired joint pages, GRScenes mesh-center reframe OK samples, and PM source-faithful raw URDF states.
Correct GAPartNet preview using raw URDF kinematic tree. Portal-native item list is populated; Assets count should be 8.
Deprecated debugging page. Do not use for asset quality judgment; SDF-FK export path mishandles GAPartNet/PM link/visual transforms.

Three-way comparison: raw PM official VLM renders, current official converted SDF keep-renders, and old self-converted visualization frames.

Official SceneSmith articulated SDF render chain from compute_articulated_embeddings.py --keep-renders: zero-joint mesh combine plus Blender CLIP-view renders.

SceneSmith official PM conversion outputs, displayed with a custom Blender-generated joint-slider viewer.
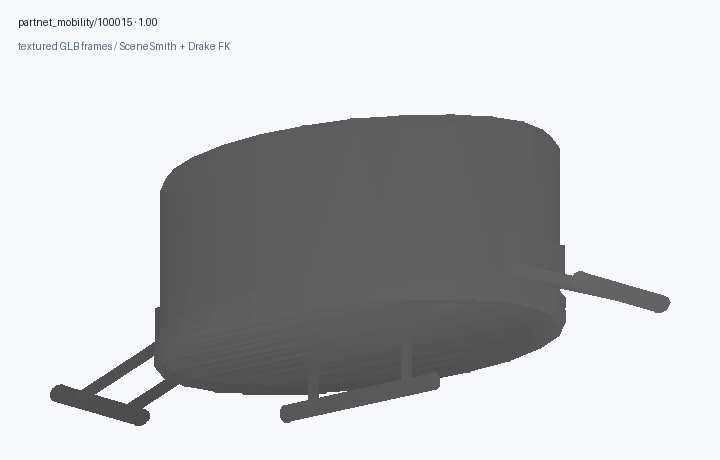
5 个 PartNet-Mobility 样本使用 SceneSmith 官方函数拆进程转换后生成的滑块可视化;Qwen-VL 迁到 GPU1 以避免 Blender/EGL 与视觉模型抢 GPU0。
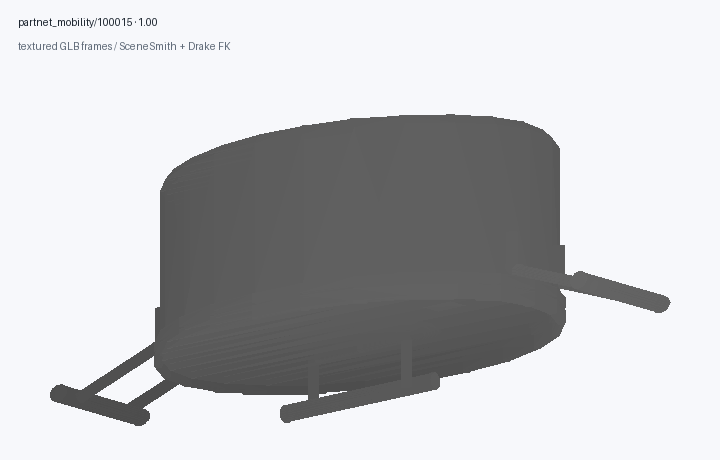
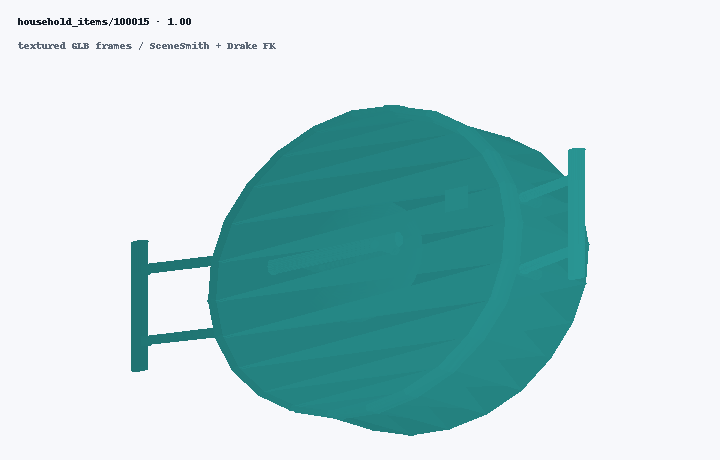
SceneSmith 官方 PartNet-Mobility 转换函数 smoke test:标准 portal 3D 预览 + 自定义滑块页面,展示 100015 的 9 帧关节状态。

真实 SceneSmith 官方链路运行:floor plan 完成,furniture 阶段直接调用 6343 资产完整包;页面展示官方 registry、停止前 placement 与所有 generated glTF。
Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.

Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.
Cross-dataset SceneSmith/Drake joint-state QC page with corrected glTF/SDF coordinate handling and textured GLB previews.

Nine slider samples from the final v0.3 publish index after strict geometry, texture, motion, SceneSmith loader, Drake parse, and assembly-audit gates.
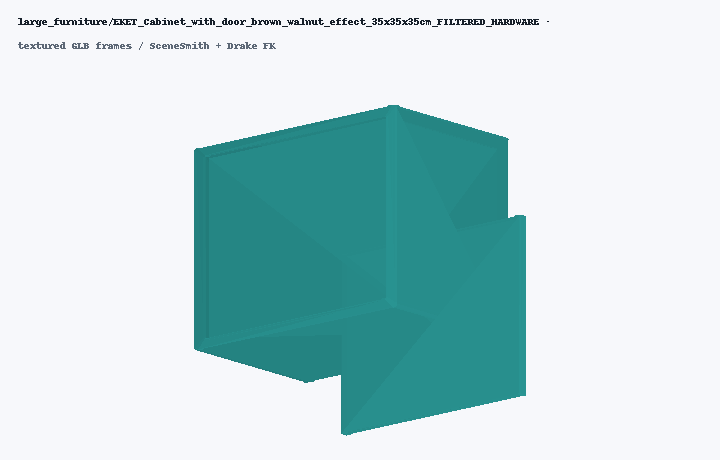
A/B check for EKET cabinet: source-faithful conversion versus filtered visual/collision that removes exposed mounting/assembly hardware meshes.
Textured multi-frame SceneSmith/Drake FK viewer for Raw ArtVIP assets; EKET exposed mounting hardware is filtered in the converted visual/collision asset while raw USD remains unchanged.
Compare current USD t-flip conversion with no additional V flip for HAUGA texture debugging.

Source-faithful PM joint-state viewer. No joint limits are modified.
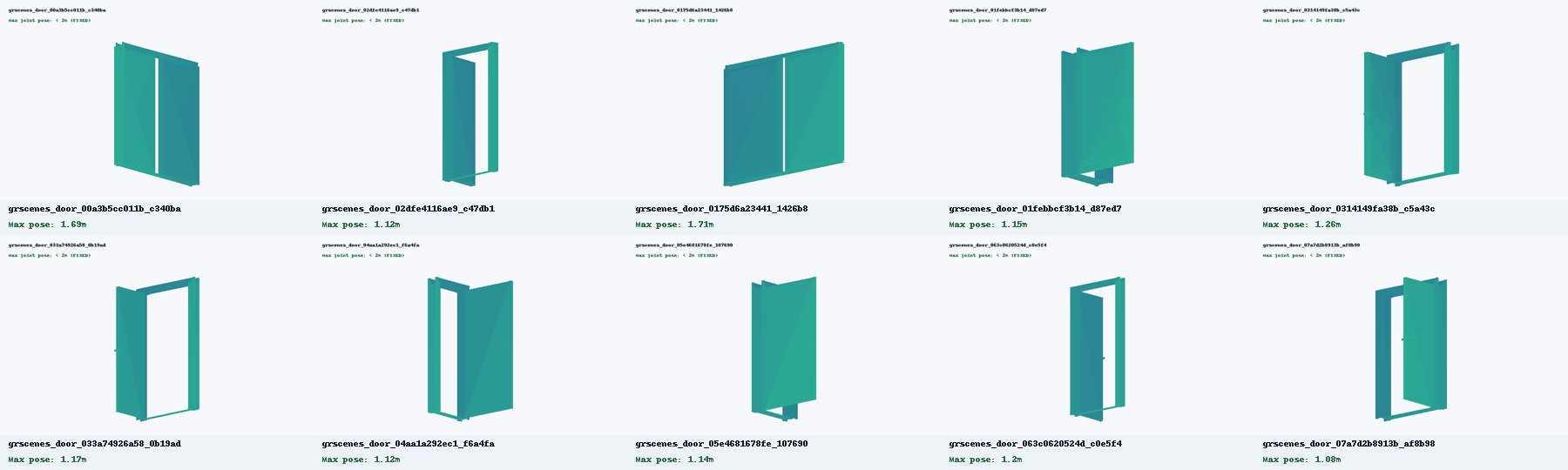
GRScenes mesh-center reframe fix validation. 10 samples converted with max joint pose <2m (previously 38m+).
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Textured multi-frame SceneSmith/Drake FK viewer for loss-minimized GRScenes articulated assets with slider control.
Mesh-center link reframe validation batch for GRScenes, composed with the official SceneSmith SDF mesh path. Shows default and max-joint states for manual assembly debugging.
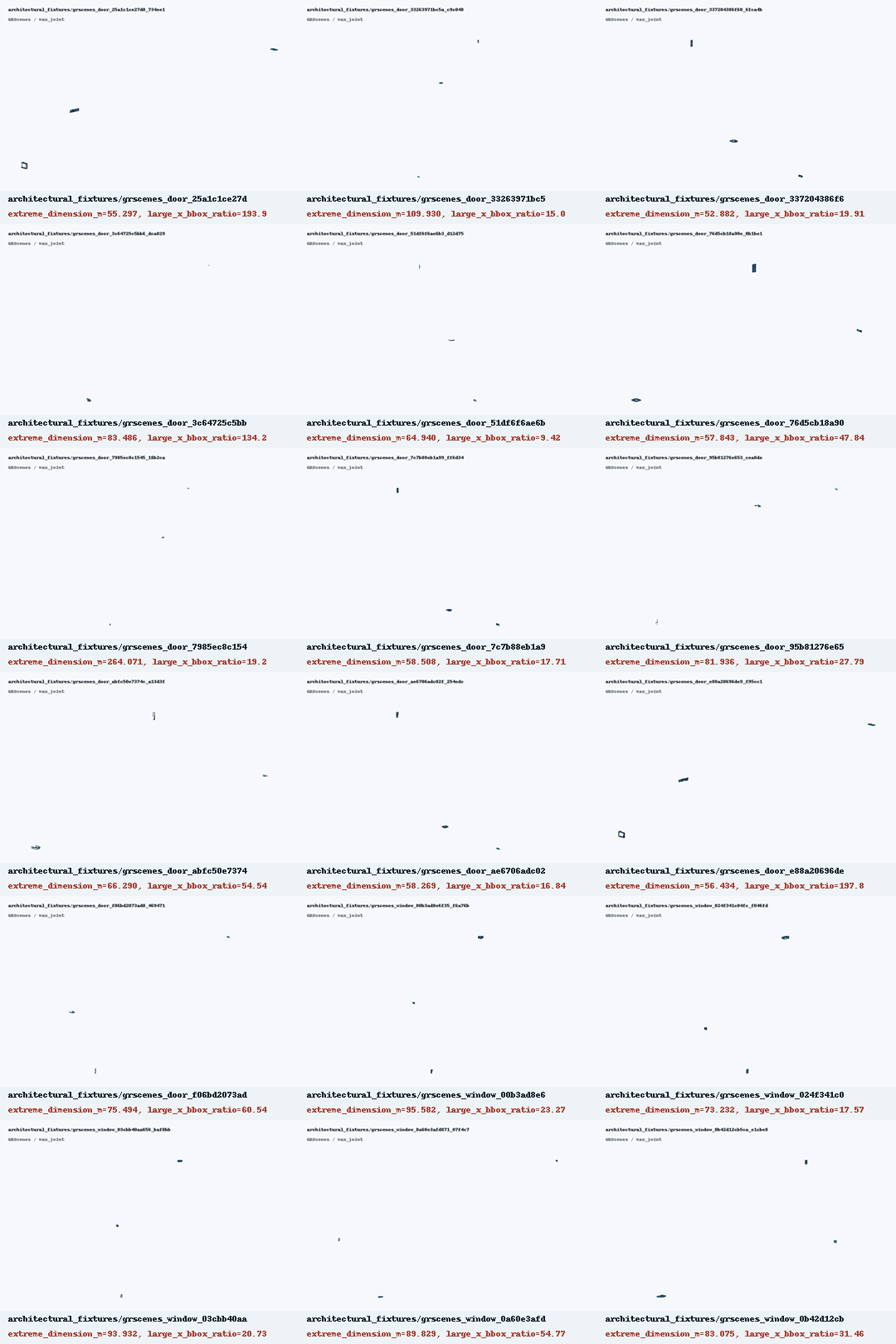
Automatically flagged assembly failures from the full SceneSmith/Drake asset audit. Most early flags are GRScenes door/window assets whose max-joint state explodes to tens of meters, indicating conversion frame/limit/unit issues.

Debug page for separating asset conversion errors from temporary renderer errors. GLBs are exported with official SceneSmith SDF mesh composition and Drake forward kinematics at default/max joint states.

Closed/mid/open visual validation frames for newly completed GRScenes articulated assets, derived from source USD Physics joint relationships and limits without modifying raw data.

Random visual smoke sample from newly completed GRScenes official articulated assets, converted from USD mesh prims to portal-viewable GLB while preserving source paths and joint-prim counts.

Natural SceneSmith furniture-stage run with no forced asset request or forced placement. SceneSmith retrieved GAPartNet/45267 from our converted PM/GAPartNet library and placed storage_cabinet_0 at (-1.499, 0.967); the run exported full scene and house Blend files, while physics validation found one west-wall penetration of about 3.81cm.

Forced smoke test using SceneSmith infrastructure plus explicit asset/placement steering. It verifies that PM/GAPartNet SceneSmith-ready v3 articulated assets can be loaded, placed, rendered, exported, and pass a 0-collision physics check, but it is not a natural SceneSmith planning result.

从 PartNetMobility、GAPartNet、PartVerse、PartNeXt 各取 4 个新样本,生成 SceneSmith-compatible derived layer。16/16 SDF 通过 Drake parse;页面已改为 16 个单资产 joint-state 交互卡片,避免多物体同屏 open 状态互相重叠,并明确标出 PartVerse/PartNeXt 当前仍是静态 part-aware mesh 占位资产。

修复 articulated asset 的 SceneSmith 放置接口:转换侧新增空的 placement_base 根 link,让原生 SceneSmith weld 到放置基准,同时保留柜体和两个抽屉 prismatic joints。当前 run 18-11-19 只放置一个 storage_cabinet_0,位于后墙附近且物理检查 0 collision;页面包含完整场景图、完整场景 GLB、closed/mid/open joint 状态渲染和可交互抽屉滑块。

用 MiniMax-M2.7 通过 OpenAI-compatible Chat Completions adapter 跑通真实 SceneSmith floor-plan chain:planner/designer/critic tool calls、本地文本评分解析、Drake 到 Blender 渲染、最终 .blend 导出均完成。

用官方 SceneSmith 仓库的 ArticulatedRetrievalServer 和 ArticulatedRetrievalClient,直接调用我们的 Raw ArtVIP batch10 SceneSmith-compatible 资产库。三条查询完成官方 loader、retriever、Drake FK mesh composition 和 GLB export,结果挂到 portal 供交互检查。

Raw ArtVIP 小批量标准转换门禁:10 个候选资产全部导出为 SceneSmith/Drake 常规 SDF 表达,保留 rigid link pose,visual/collision mesh 为 link-local,joint pose/axis 按 USD Physics body0 joint frame 映射;全部通过结构校验、Drake parser 与 0.05s 动态 smoke。

把本地 raw ArtVIP 的 cabinet_1.usd 解析为 SceneSmith-compatible 资产包:SDF 表达 3 links / 2 prismatic joints,visual mesh 导出为带 PBR/texture 的 per-link glTF,collision 使用 CoACD 生成 47 个 convex pieces,properties/provenance/embedding index 齐全,并通过结构、Drake parser 与短时动态仿真 smoke。

以 SceneSmith ArtVIP VHACD 包为 gold format,抽取 cabinet、fridge、microwave 三个 articulated assets,建立统一资产库的 SceneSmith-compatible 交付层。该页面展示 SDF + VHACD + properties + embeddings 的 smoke validation 结果;当前 trellis2 环境缺少 pydrake,Drake load 留给 SceneSmith/Drake 环境执行。