螺旋不变量机制 — 复现与可视化
这是什么
B-line 文献(PARIS 2308.07391 / ScrewNet / ScrewSplat 2508.02146 / PAOLI / ArtPro 2602.22666)
共享同一个机制:旋转关节的运动是一个螺旋(Chasles 定理),关节本身被恢复为"使逐点螺旋不变量归零"的那条轴。
本页在真实 PNM 资产 PNM_100141(Box 盒盖,hinge 扫过 90°)上,用两条彼此独立的机制恢复同一条螺旋轴,
再把"螺旋不变量"到底长什么样画出来。
这一步复现的是无噪声、给定真实对应的干净机制层——证明数学骨架在我们的真实数据 + 已验证 FK 上完全成立, 且我们的可微版本与文献的闭式版等价。它尚未涉及小部件/噪声鲁棒性(W2.6)与单图前馈摊销(I1 的 H1/H2)。
两条机制恢复同一条轴(精确一致)
| 机制 | 方向误差 vs GT | 轴心垂距 vs GT | 备注 |
|---|---|---|---|
| (A) 闭式螺旋分解 Kabsch 求 R,t → Chasles 提轴(ScrewNet/PARIS 标准) |
0.00° | 2.7e-7 | 旋转角 90.0° |
(B) 梯度下降最小化 L_rev我们的可微 / 可摊销版本 |
0.00° | 1.7e-5 | L_rev=6.6e-11;5 初始化 spread 0.0° |
| 两法之间夹角 | 0.00° | — | 两条不同数学路径落到同一条轴 |
图 1 — 螺旋运动本身
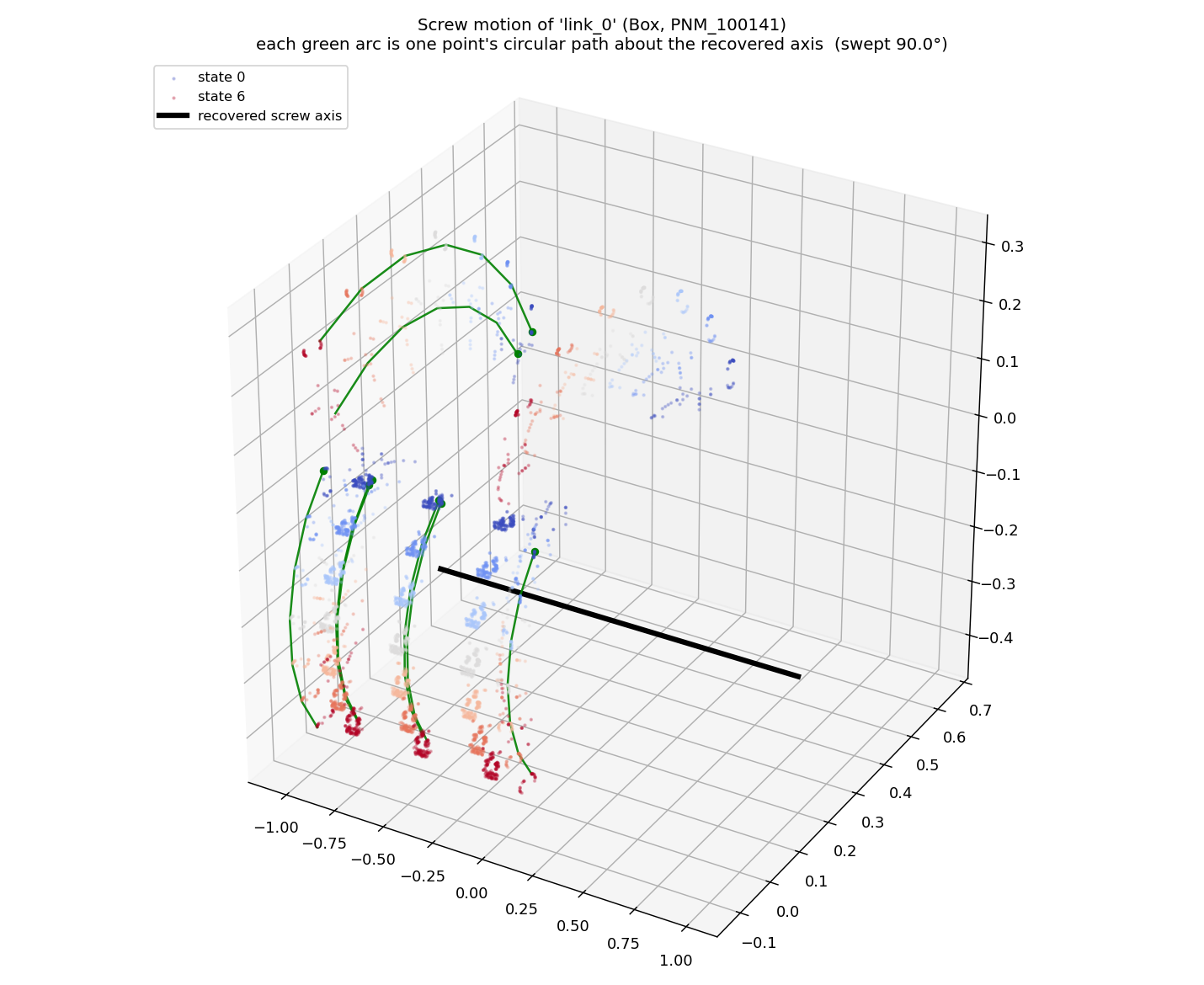
图 2 — 不变量签名(最关键)
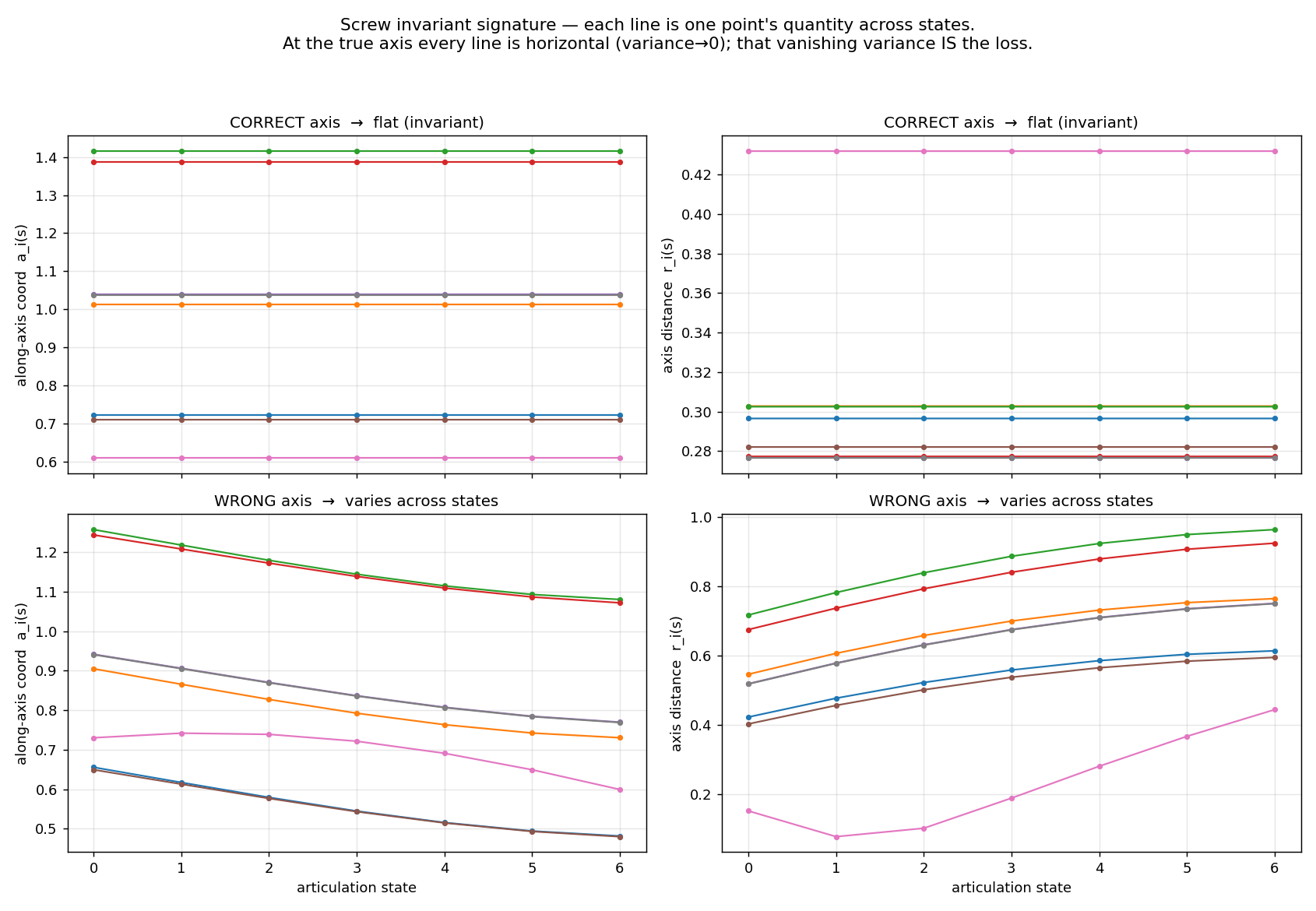
a_i(s) 与到轴距离 r_i(s) 全是水平直线——
无论盖子转到哪,每个点的这两个量纹丝不动。这个"方差为零"就是不变量,也就是 loss 本身。
下排(故意给错的轴):两个量随状态明显漂移/弯曲,方差被拉起、loss 变大。图 3 — 残差地形
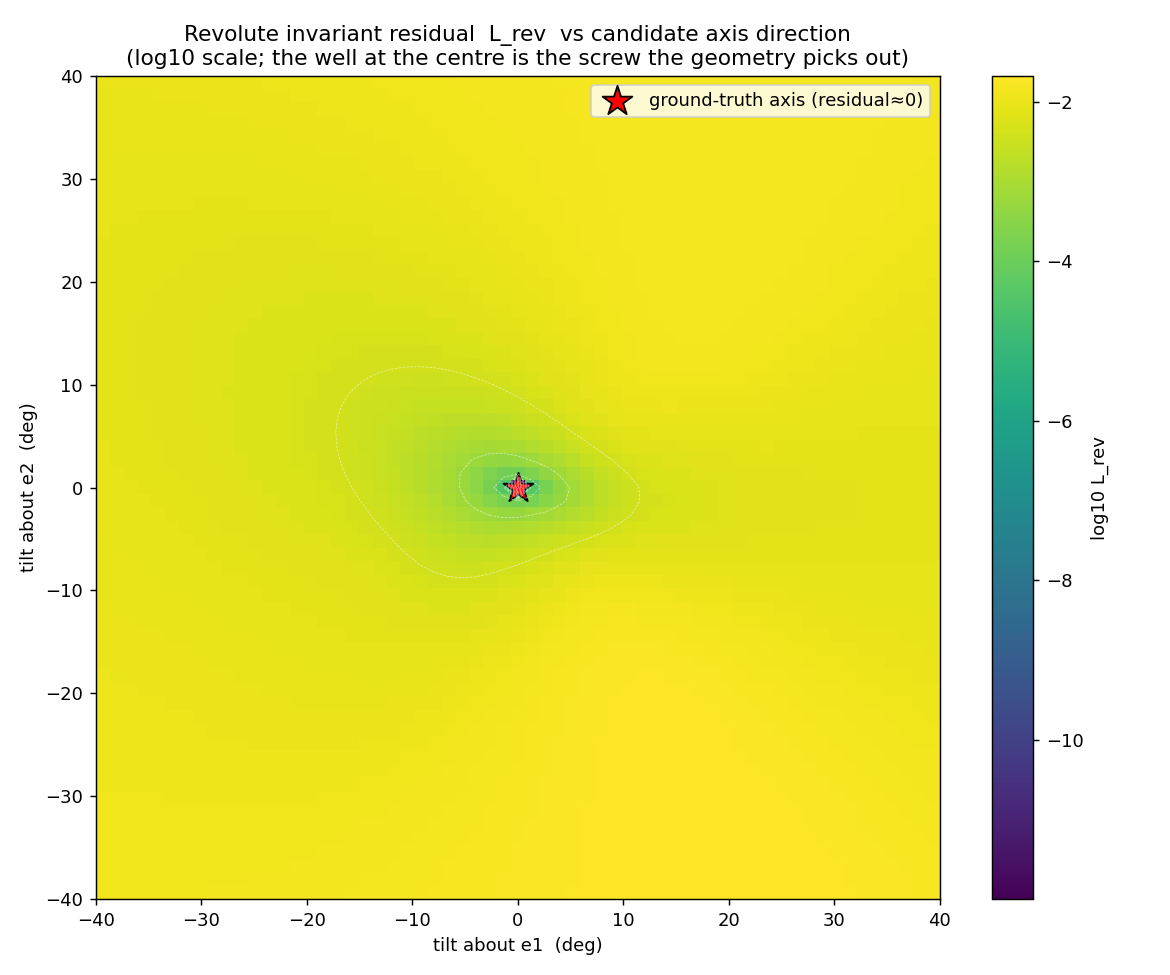
log10 L_rev 热图。
中心(GT,红星)是一个深井,残差比四周低约 10 个数量级——几何把这条螺旋轴挑得干净利落、无平台、无歧义。
这正是逐物体优化能收敛、也是我们想摊销进单图前馈头的那个 well。噪声叠加 — 复现 W2.6 小部件失效 + P1 修复
把噪声加到上面的干净机制上。在一个真正的小部件(PNM_100214,part/object 直径比 0.088)上,
"3% 物体尺度噪声"其实等于这个部件自身尺寸的 ~34% —— 信号被淹没。下面三张图把这个过程画出来,
锚点数字(@3%、@10%)与已记录的 P1 pilot 完全一致。
图 4 — 噪声搅乱不变量签名
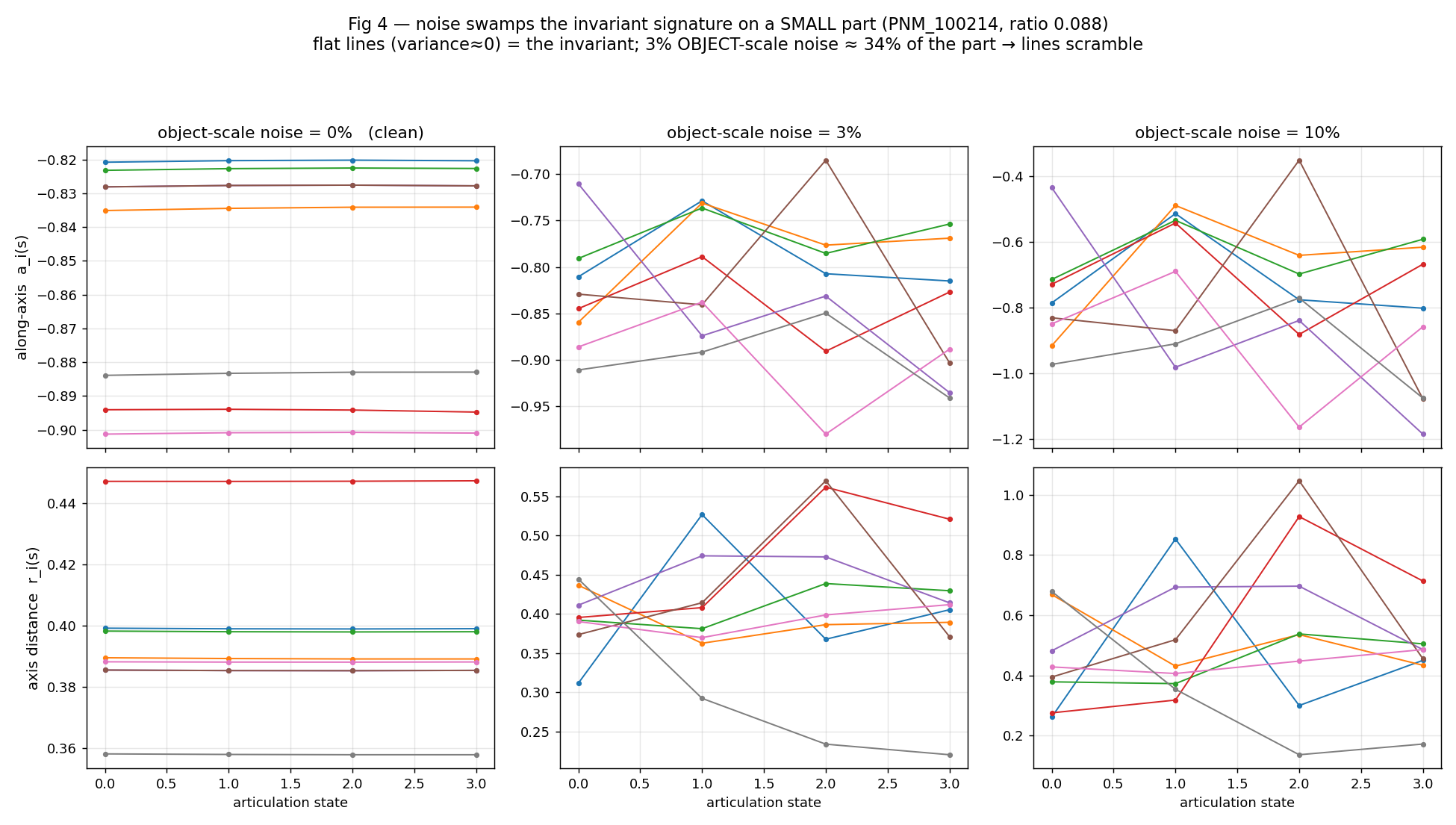
a_i(s)/r_i(s):0%(左)还是平线,3%(中)开始错乱,
10%(右)彻底乱掉。对比清洁页图 2 的盒盖(大部件),同样的百分比噪声对小部件杀伤大得多。图 5 — 噪声填浅残差井
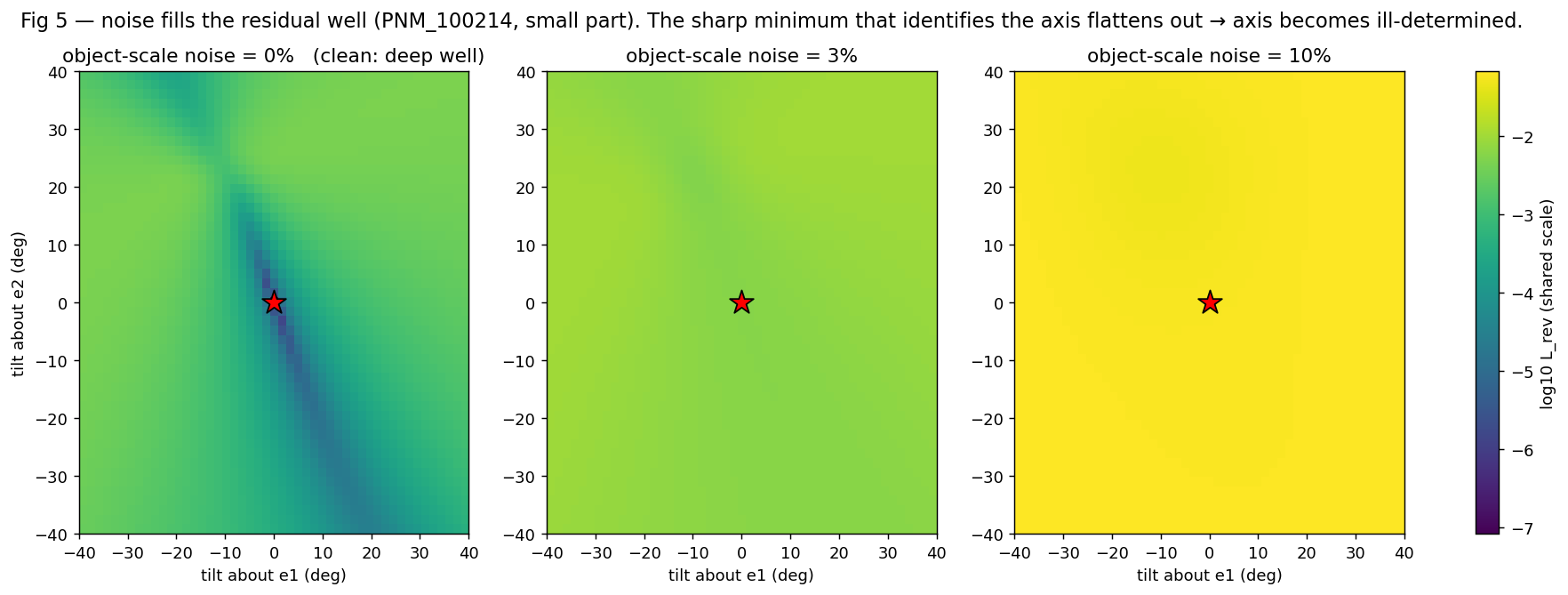
L_rev 地形(共享色标):0% 还有可辨识的深谷,
3% 已填成一片,10% 完全平 —— 螺旋轴变得不可辨识。这就是 W2.6 轴误差爆炸的几何原因。图 6 — W2.6 头条曲线 + P1 part-scale 修复
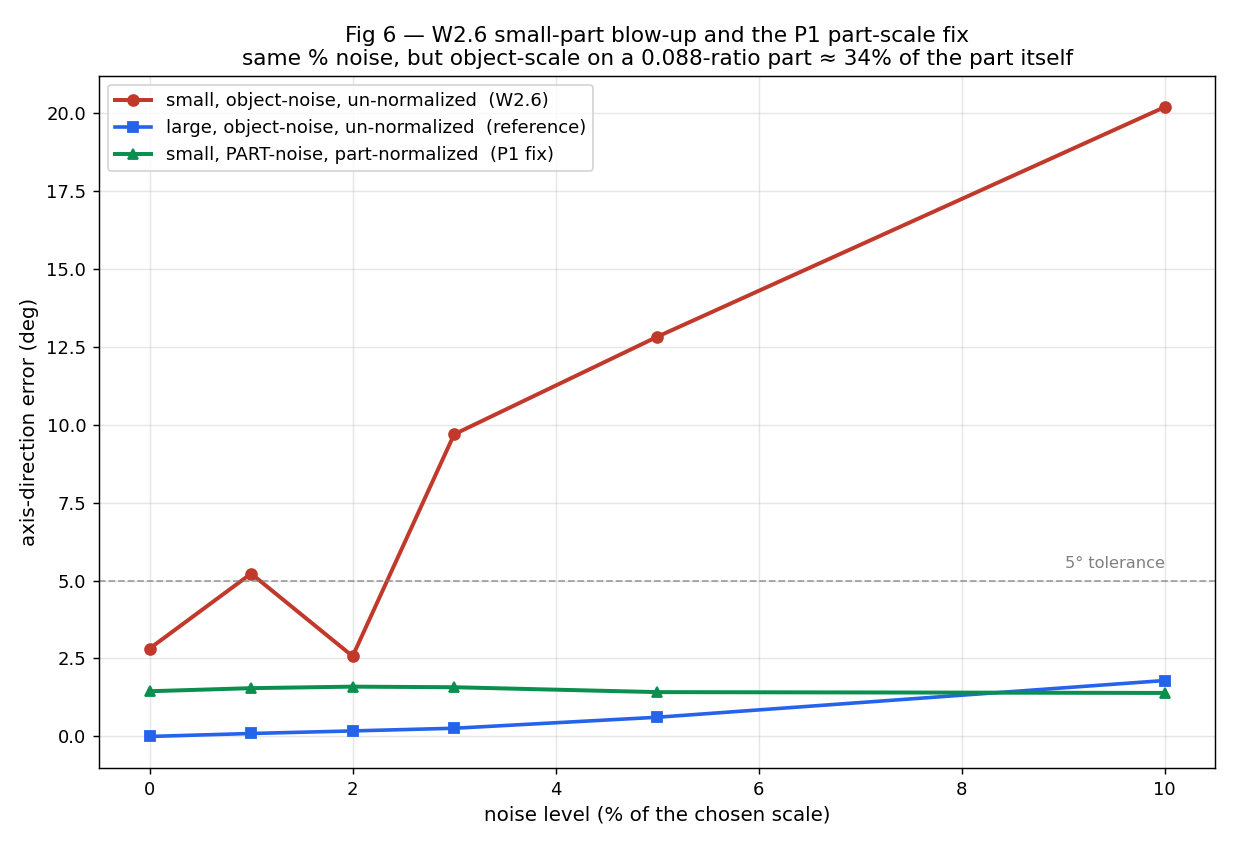
关键 nuance(来自 P1):真正的杠杆是噪声尺度模型(part- vs object-relative),不是坐标归一化本身—— 轴方向是尺度不变的。所以 I1 的小部件主张应表述为"在 part 尺度上监督/加权"。
⚠ 重要修正(下方 task① 实测后):fig6 红线那个 W2.6 爆炸,是"未归一化、错条件恢复"的伪影,不是表征本身的极限。 在真实体素分辨率下用良条件、多点恢复,小部件螺旋轴恢复其实是准确的(见 task①)。这条悲观线不要当成定论—— 详见下方"task① 真实重建噪声模型"。
task① — 真实重建噪声模型(实测,修正悲观假设)
问题:我们的体素管线(SS 16³ / SLAT 64³,全局栅格)对小部件造成的几何噪声,是落在 fig6 的乐观(绿)还是悲观(红)区? 在 90 个真实 PNM revolute 部件上实测。结论 NUANCED:
图 8 — 噪声结构:确实是"物体相对"的(premise 成立)
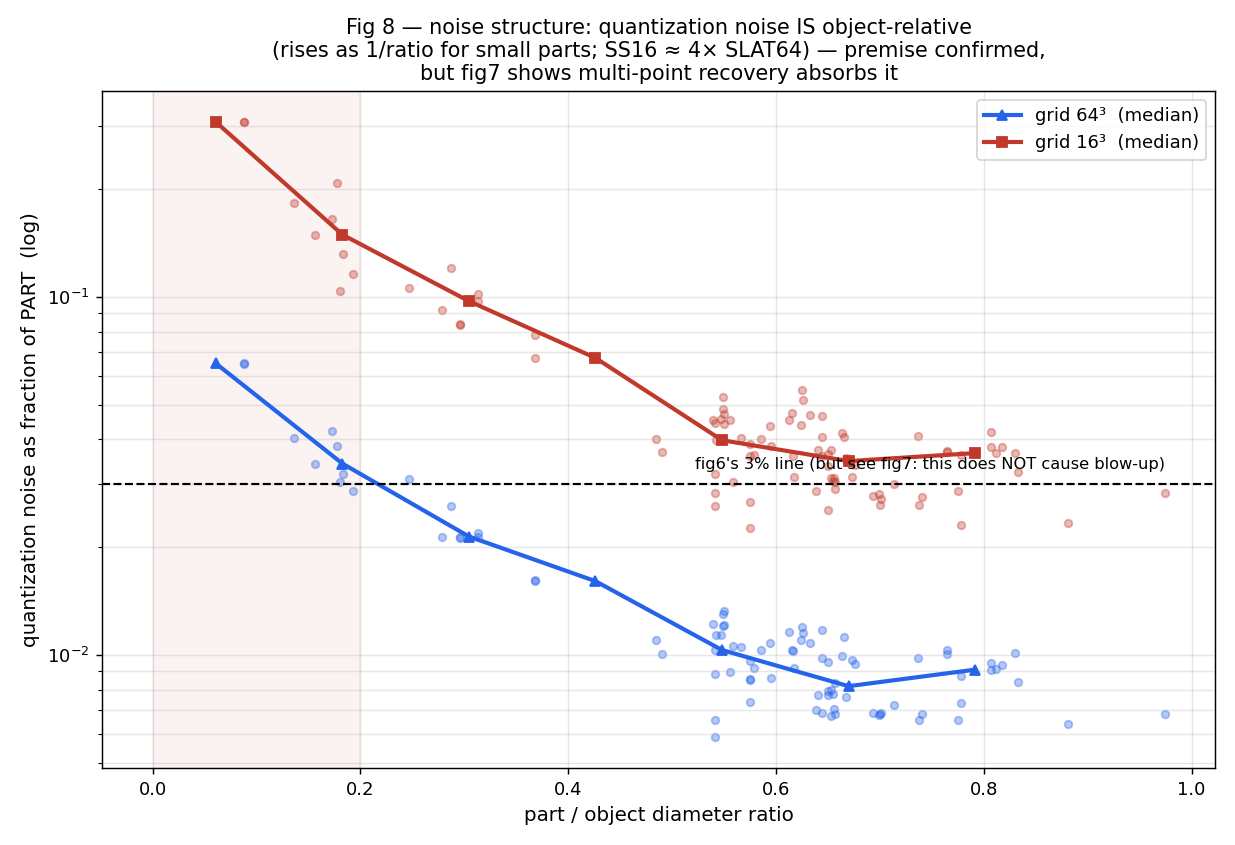
图 7 — 但轴恢复误差实测仍低(修正 fig6)
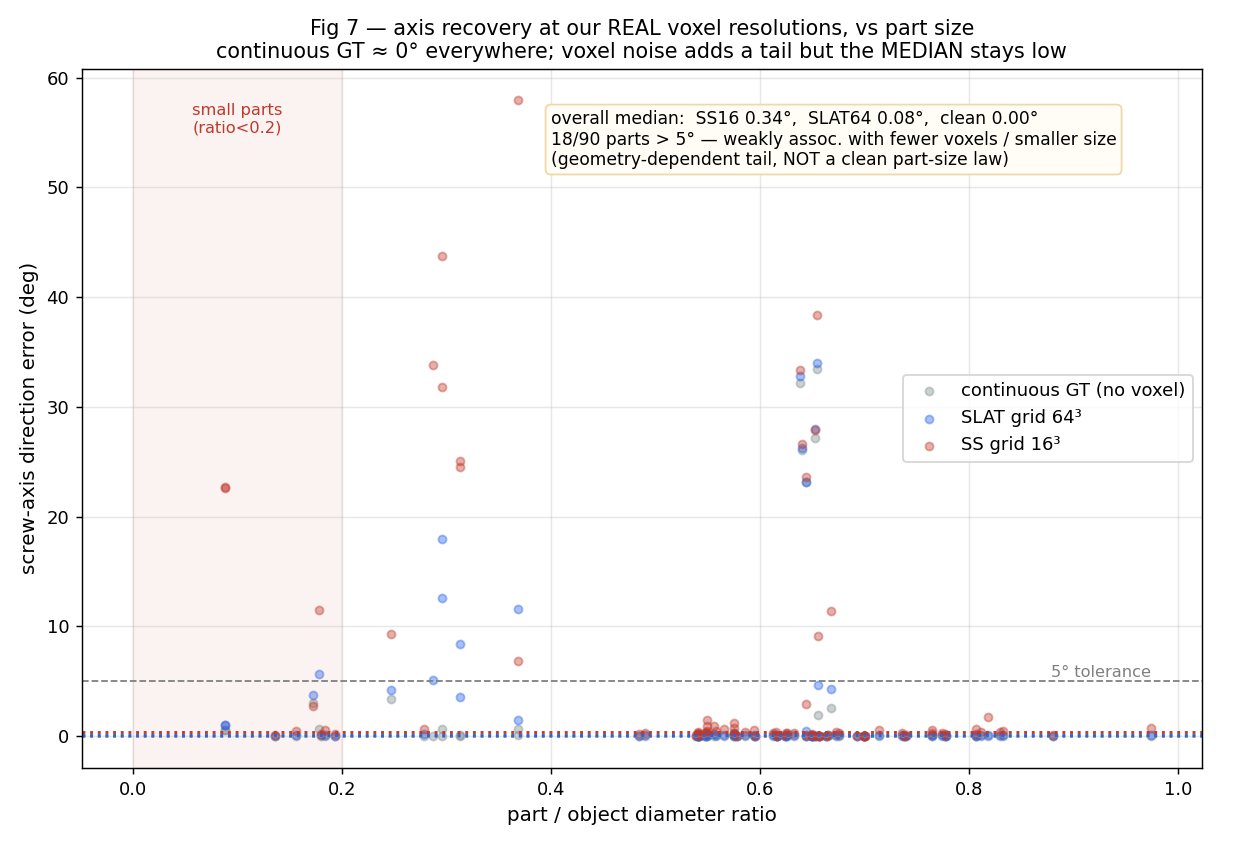
诚实边界:本测试仍用 GT FK 对应关系(同一批点跨状态对应)。真实重建会丢失对应关系, 且 SS16 的 3 体素欠采样下部件形状几乎无法表征——这部分风险本测试没覆盖,需要真实重建产物才能测(目前缺)。
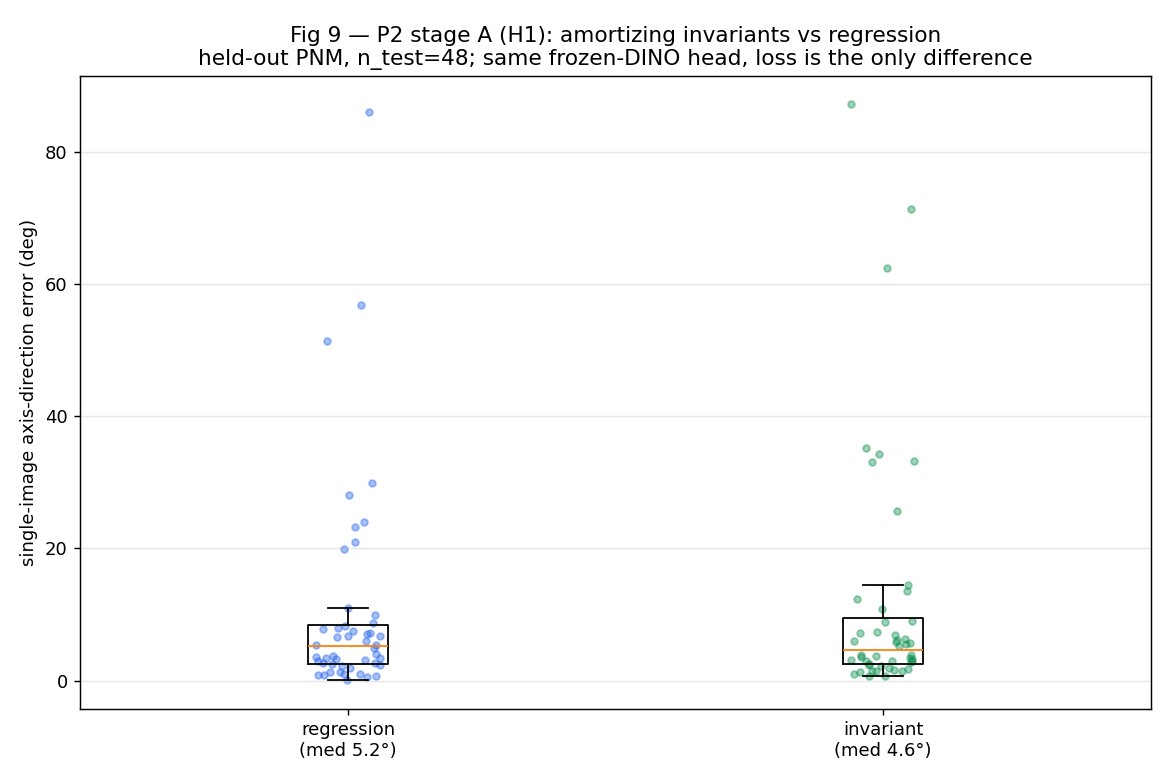
task② — P2 单图前馈摊销探针(H1,能杀 I1 的一刀)
设计文档最便宜的证伪点:把不变量监督摊销进单图前馈头,看能否追平直接回归。 冻结 DINOv2 ViT-L/14-reg → 小 MLP 头 → 预测螺旋轴;两个头架构/数据/划分完全相同,只有 loss 不同 (回归 GT 轴 vs 不变量 L_inv on FK 多状态栈)。在 160 个 PNM revolute 部件、held-out 48 个上测单图轴误差。
图 9 — H1:不变量摊销 vs 回归
task② — P2 stage B(H2 跨 schema,headline):证伪
H2 是 I1 真正的新颖度回报:训练只在 PNM,零样本测 ArtiCraft / ArtVIP,看不变量监督是否因 schema-agnostic 而迁移优于回归。
图 10 — 跨 schema 迁移:回归 vs 不变量
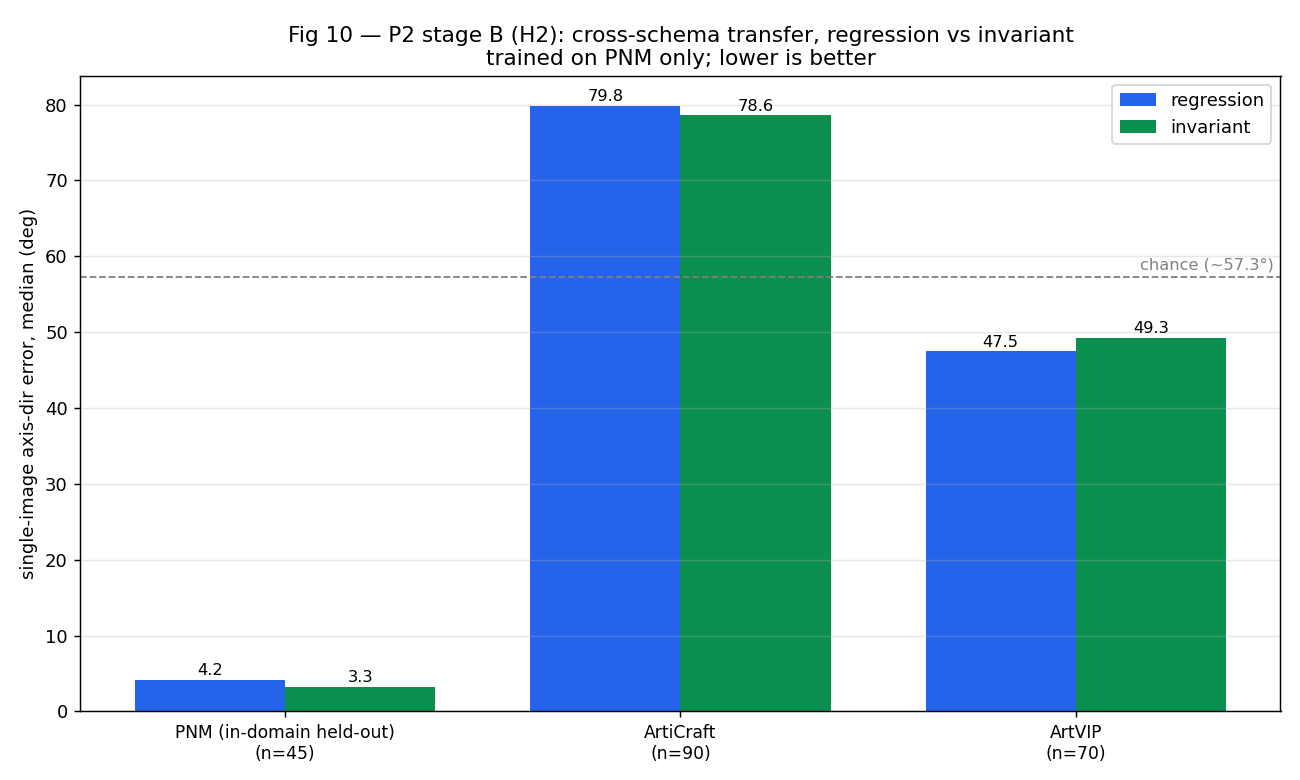
VERDICT:H2(零样本前馈路线)证伪。不变量监督在跨 schema 上不优于回归——两者一起崩。 瓶颈在上游:单图编码器根本解析不了 OOD 外观/几何,"哪种监督更会迁移"这个问题在头崩掉时无从谈起。 这正是设计文档 R2 预言的失败方式,也与 I3 的 PNM→ArtiCraft 塌方(0.40)同构。
诚实边界(别过度宣判 I1 死亡):① 这是零样本——最苛刻设定;崩溃主要是外观/几何域差,不纯是关节约定问题。 ② 测的是便宜 DINO-头代理,非完整 Stage-2 生成器。③ I1 机制的更弱但更站得住的版本——"一个不变量 loss 可联合监督多源、 无需 schema 对齐"(目标数据在训练集内)——本探针没测,仍开放。但 H2 字面所述(零样本 invariant>regression)已证伪。
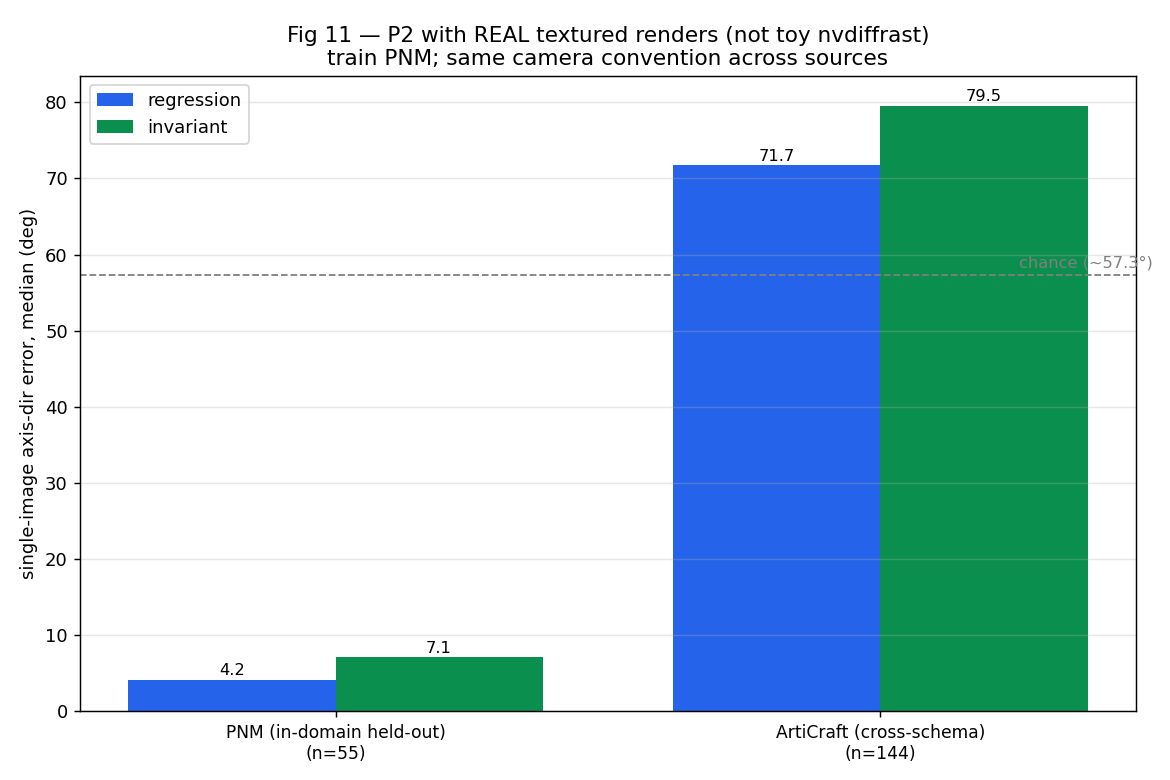
H2 复核 — 用真实纹理渲染重做(回应"为何用玩具图"的质疑)
上面的 H2 用的是我图省事渲的平面着色玩具图(相机虽跨源一致,但外观是 confound)。
用真管线的 真实纹理渲染(预处理 imgs/00.png,PNM 与 ArtiCraft 共用同一套 TRELLIS view_index 相机环)重做:
图 11 — 真实渲染下的 H1/H2
两点诚实更正(本轮发现):① 修正后的 __official SLAT 潜变量确实在盘上(嵌在每个预处理资产
trellis_part_preprocess/latents/...__official/part_X.npz),生成脚本 production_official_reencode.py 也在——
我早先"latents 不在盘上"的说法是错误搜索导致,已纠正。② 但修好的是 SLAT 解码器(几何),与本 I1 探针用的 DINO 图像编码器
是不同组件,故不改变 H1/H2 数字;真正改善的是把玩具渲染换成真实渲染(域内更稳),而那也救不了跨 schema。
I1 决策门小结 + 下一步
结果账本:机制复现 ✓ · ArtPro R5 新颖度 ✓ · task① 噪声模型(NUANCED,悲观假设被修正)✓ · H1 域内摊销 SUPPORT ✓ · H2 零样本跨 schema 证伪 ✗。
对 I1 的判定:按设计文档自己的决策门—— "若 P2 显示不变量监督跨 schema 不优于回归 → schema-agnostic 主张一文不值 → 报告负结果而非扩大规模"。 I1 退化为"域内精度故事",不是"跨域泛化故事"(与 OSH 路线结局同构)。其新颖度楔子的第二半(schema-agnostic 多源迁移) 在便宜的零样本前馈路线上没兑现。
- 仍开放(I1 的可救版本):把零样本换成多源联合训练——一个不变量 loss 同时监督 PNM+ArtVIP+ArtiCraft(目标数据在训练集内), 看是否比"逐源回归 + 手工 schema 对齐"省事且不掉点。这才是 §3.3"统一监督语言"的字面主张,比零样本弱但更站得住。
- 真实重建对应关系丢失测试:task① 仍用 GT FK 对应;需真实重建产物测无对应、SS16 欠采样下的恢复。
脚本:screw_invariant_reproduction.py · screw_invariant_noise_demo.py ·
i1_recon_noise_model.py(task①)· i1_p2_amortize_probe.py(H1)·
i1_p2_h2_crosschema.py(H2)· 数据 JSON 见 assets/。