一句话: desktop 的 ROUTE 想把"逐件手调启发式"收进一个有原则的核心——几何固定,只把关节当「物理约束下对 gpt-image 多态序列做轮廓分析-合成」的优化解出来(轴/轴心/range 全从优化掉出)。本页是它在微波炉上的 MVR(生死判据):结论是纯轮廓解不动轴 → 触发早死线,据此用户定稿为混合路(轴/铰用先验 + 轮廓只解角度/range + #47 重写为腔体安全碰撞)。
管线:① 切门/机身 → ② 4态前景掩码 → ③ 逐态相机+共享铰+各态θ 可微 silhouette 优化 → ④ 判据 → ⑤ #47 腔体安全碰撞
判据总览(ROUTE §七 回执)
| 判据 | 纯多态轮廓优化 vs 手调 | 结论 → 定稿 |
|---|---|---|
| 轴 axis | 纯 silhouette 解出轴偏垂直 65.7°(opt01);加质心后铰飞出物体、轴偏 33°(opt03)。只有套"垂直先验"才与手调持平(1.2°)。 | ✗ 轮廓不可解 → 轴/铰用几何先验(保留) |
| 方向 direction | 门朝前合拢方向正确。 | ✓ 平局(都对) |
| 闭合 closed | 闭态全轮廓逼门折平 → 闭合 ≈100° 真正关上;手调 58° 仍半开虚掩。 | ✓ 轮廓胜 → 轮廓解角度/range |
| 零穿模 | ✓ 已修支撑零穿模 range [0,100°] 零深穿 |
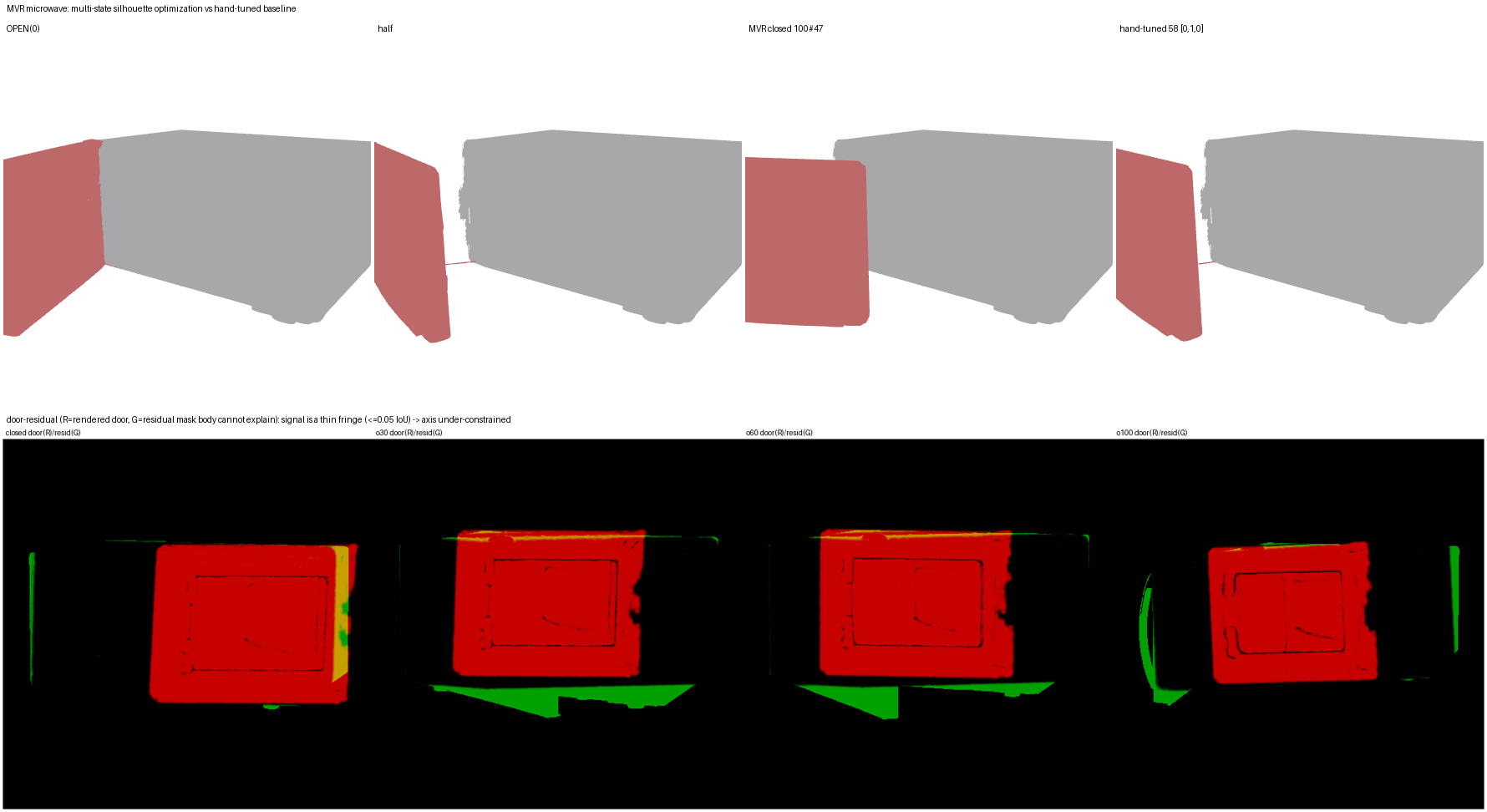
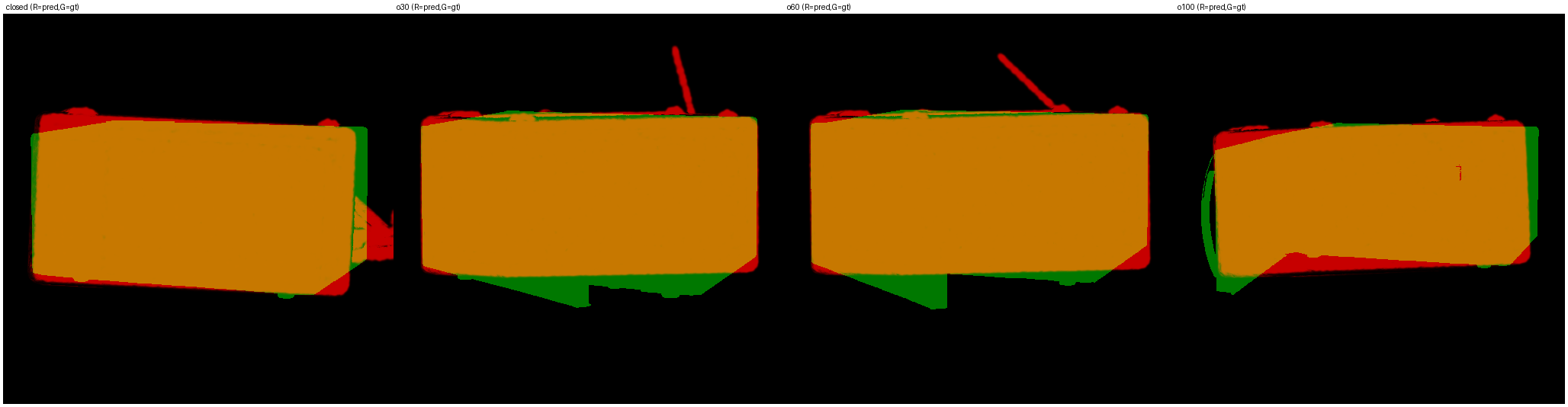
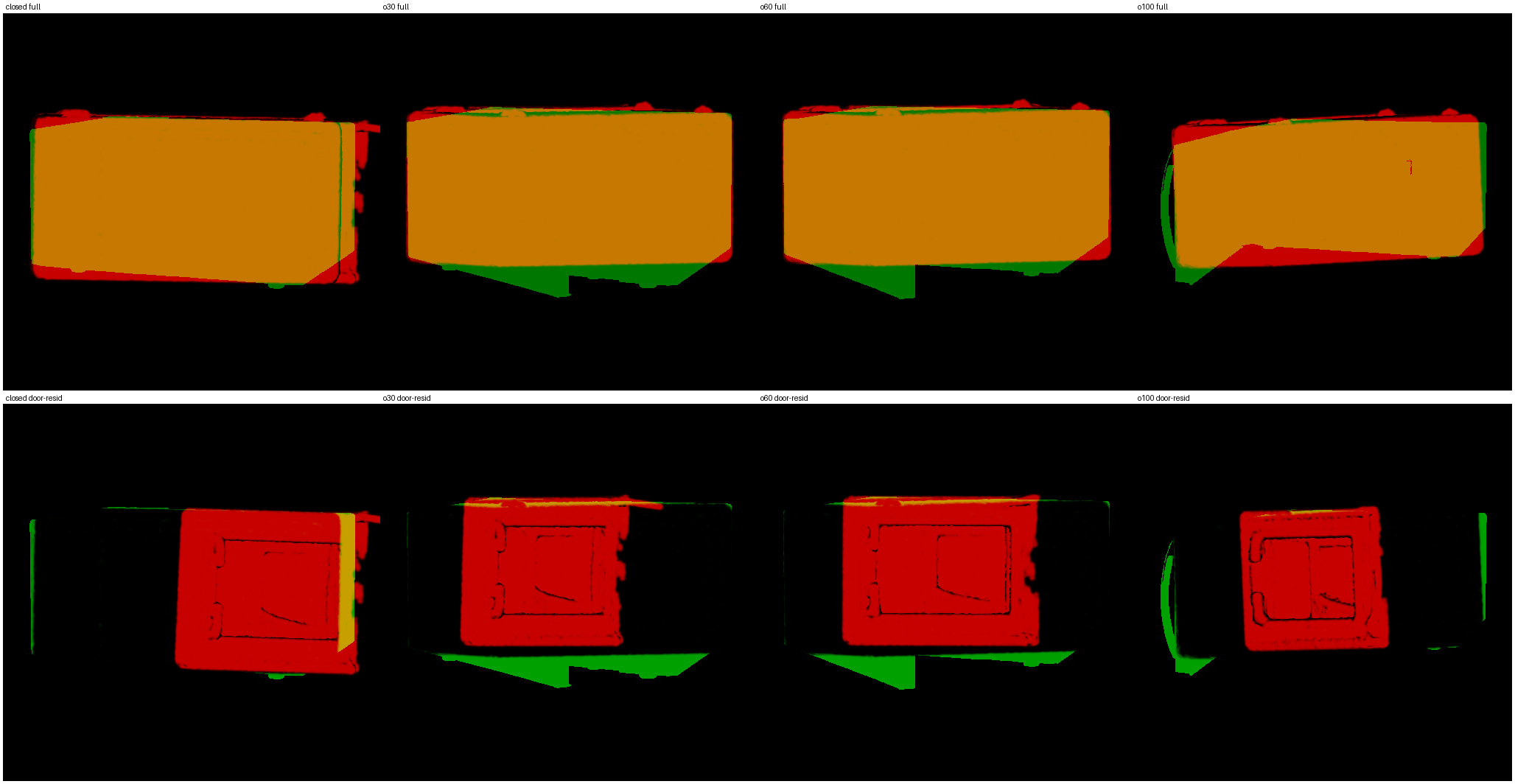
上:3D 闭合对比(OPEN / half / MVR 闭合 100° 真关上 / 手调 58° 仍虚掩)。下:门残差(红=渲染门, 绿=机身解释不了的残差)——信号只是一条薄边。
① 几何:切门/机身(肉眼验证)
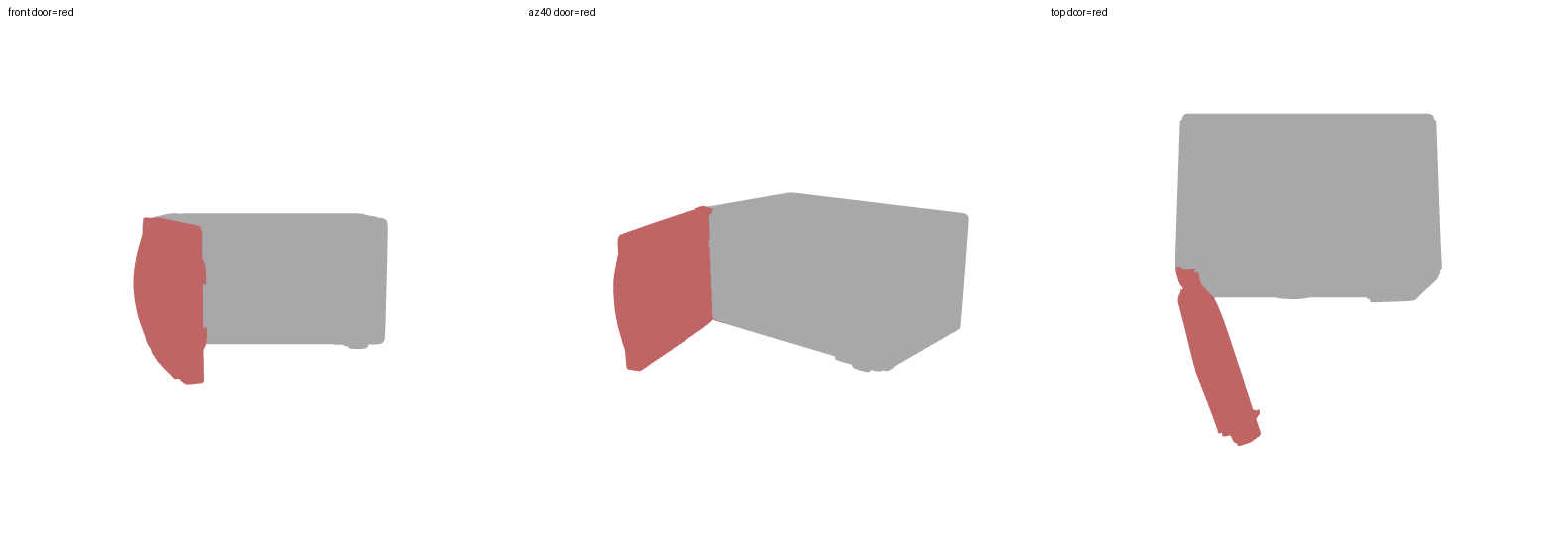
开腔 TRELLIS2 mesh + P3-SAM 映射 → 门(红, part id 94+0, 占面 19.8%)= 顶视图里斜伸出的整块板;其余为机身。切分干净。
② 多态目标:4 态前景掩码 + 关键观察=相机大漂

rembg 抽 closed/30%/60%/100% 前景 silhouette。关键:gpt-image 各态相机大漂(闭态近正面 → o100 转 ~40° 侧视),正是 ROUTE §六 预警的视角漂 → 优化必须逐态解相机。
③ 核心实验:为什么纯轮廓解不动轴
诊断三连:
1. 机身主导 — full-silhouette IoU 里静止机身占 ~80% 面积,门只值 ~0.1 IoU;轴偏 65° 时 IoU 仍 0.86,轴误差被吸收。
2. 门残差天花板 — 俯视 3/4 视角下门朝相机摆、挡在机身前,门主体投影落在机身轮廓内被
3. 相机漂是 nuisance — 逐态相机自由度进一步吸收关节误差。
1. 机身主导 — full-silhouette IoU 里静止机身占 ~80% 面积,门只值 ~0.1 IoU;轴偏 65° 时 IoU 仍 0.86,轴误差被吸收。
2. 门残差天花板 — 俯视 3/4 视角下门朝相机摆、挡在机身前,门主体投影落在机身轮廓内被
mask−base_sil 减掉,残差只剩底/侧一条薄边(画面 1.7–3.4%),door-resid IoU 封顶 ≤0.05(下图铁证:红门 vs 绿残差几乎不相交)。soft-silhouette 梯度又局部,不相交即梯度≈0。3. 相机漂是 nuisance — 逐态相机自由度进一步吸收关节误差。
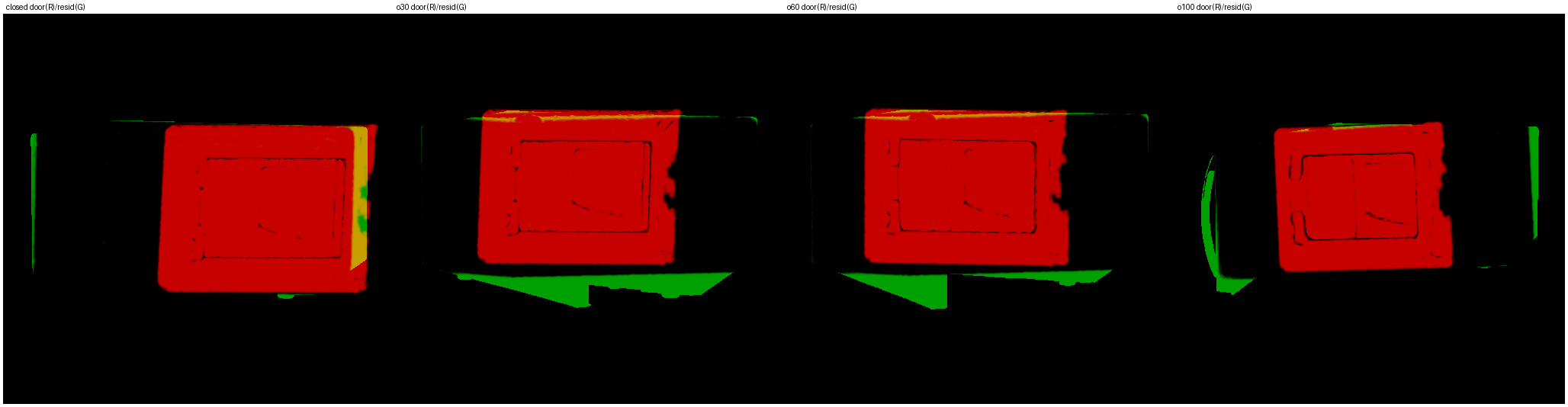
决定性实验(固定铰+相机,只优化 轴+θ,DT 距离变换损失):红(渲染门)是整块面板,绿(残差)只是薄边,二者几乎不相交 → 轴信号被视角几何天花板锁死,非优化没调好。
→ 那个"能用"的关节(闭合 100°)= 几何先验(接缝铰+垂直轴)+ 全轮廓角度微调 的混合;闭合角是轮廓真贡献(闭态 full-mask 要求门折平→100°,故赢手调 58°),轴/铰仍由先验决定——恰是 ROUTE 想退役的先验在起决定作用。
⑤ #47 物理度量修正(本轮·腔体安全)
问题(旧):
修法(新): 用 python-fcl 表面碰撞 替代体素——只检测真实表面互穿、不填腔,故门进开口(自由空间)= 无碰撞,门撞墙 = 真碰撞,天生腔体安全;剔除门铰带面避恒接触。
trimesh.voxelized() 把机身实心体素化,腔体被填实 → 门根/门进开口都落入"实体" ⇒ open 态伪穿透 12039、穿透随开合反向。修法(新): 用 python-fcl 表面碰撞 替代体素——只检测真实表面互穿、不填腔,故门进开口(自由空间)= 无碰撞,门撞墙 = 真碰撞,天生腔体安全;剔除门铰带面避恒接触。
| 区间 | 现象 | penetration depth |
|---|---|---|
| 0–96° | 门自由摆(接触≈0) | ≤0.2% 对角线 |
| ~100° | 门坐合到前脸(接触 18→2964,=自然闭合止点,与轮廓 100° 重合) | ~0.4–0.5%(浅贴合) |
| >100° | 过转,门压进前脸/控制面板(接触 →15654) | 物理止点 |
| #47 修正前后曲线 | 关键态 3D(门位姿 + 接触) |
|---|---|
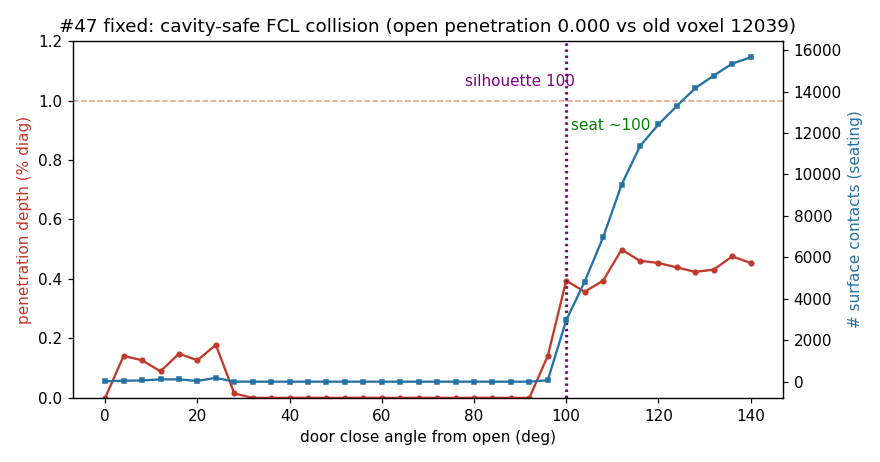 | 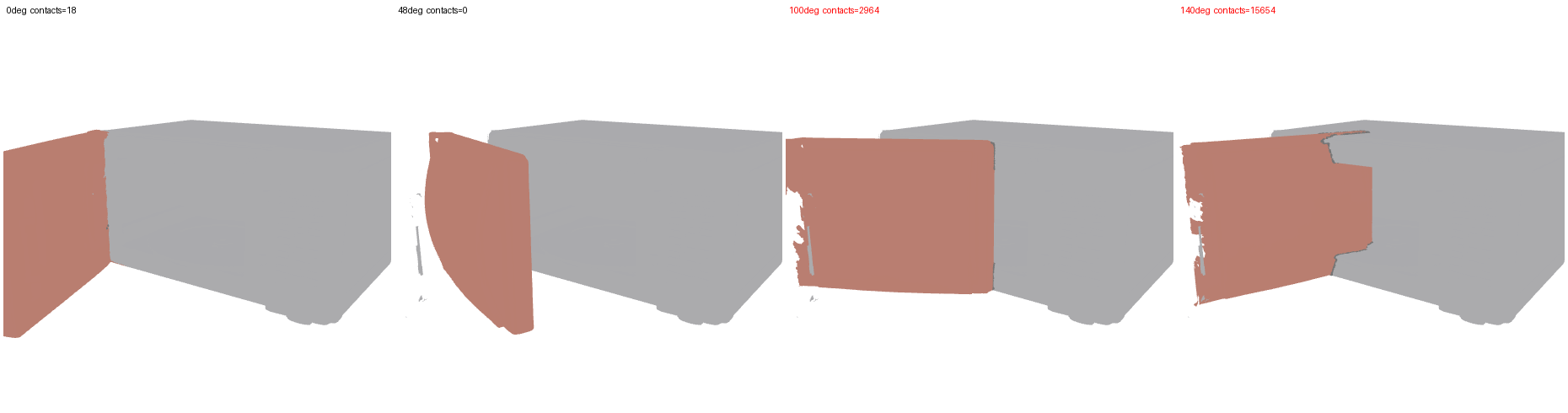 |
sanity:open 态穿透 = 0.0000(旧体素 12039) ✓ 腔体填实伪穿透消除。可行 range = [0, 100°](自由摆 + ~100° 坐合),全程无深穿墙(depth <0.5% 对角线 = 薄壳贴合),可支撑"零穿模"。3D:0° 开 / 48° 空中自由摆 / 100° 坐合盖前脸 / 140° 过转压面。
定稿路线(用户 2026-06-21 锁定)= 混合
1. 轴/铰:几何先验(接缝/OBB,已对)——保留,不退役。 MVR 证明纯轮廓解不动轴、先验对且不可替代。
2. 轮廓:只解角度/range。 已验证赢手调(闭合 100° vs 58° 虚掩)。
3. #47:面/SDF 腔体安全碰撞——已修。 再谈硬约束以此为准(open 0.000,range [0,100] 零深穿)。
仍可选(非本轮必须):换一致性多视角(Nano-Banana)/ 深度监督,若日后想让轮廓也帮定轴。
2. 轮廓:只解角度/range。 已验证赢手调(闭合 100° vs 58° 虚掩)。
3. #47:面/SDF 腔体安全碰撞——已修。 再谈硬约束以此为准(open 0.000,range [0,100] 零深穿)。
仍可选(非本轮必须):换一致性多视角(Nano-Banana)/ 深度监督,若日后想让轮廓也帮定轴。
附:优化各阶段叠图(留档)
opt01(full-IoU 联合,轴漂 65.7°):
opt02(门残差聚焦+垂直轴初值,轴守垂直但 door-resid≈0):
EPPUR · ROUTE v2 MVR · 2026-06-21 · 代码
openstate_pilot_20260620/mvr_route_v2/(g01/g02→m01/m02→opt01-04→val→phys_fix/phys_viz)· 报告 reports/MVR_ROUTE_V2_REPORT_20260621.md · 环境 conda_envs/trellis2(pytorch3d 0.7.9 / nvdiffrast / kaolin / rembg / python-fcl 0.7)· 真渲真数据,禁 fallback。