PAct 域内推理 · 用 PhysX-Bench (KPS) 方法评估铰链合理性
把 PAct 复现在 7 个 PartNet-Mobility 域内物体上的单图→可动 3D 预测 (diffuse_tree → URDF), 用与 PhysX-Omni 同一套 PhysX-Bench 协议评估: 自建 FK+Blender(EEVEE) 渲「闭/开」两态 + PhysX-Bench MuJoCo 关节运动视频 (KPS 证据格式)。可与 PhysX-Omni 那页同协议横向看。
诚实声明 (务必先读):
1. PhysX-Bench (KPS) 测的是运动学合理性 (plausibility), 与 PAct 论文表里的 GT 几何指标 (dgIoU/CD) 是两条不同的轴; 本页不等同于复现论文 Table 数字。
2. 完整 KPS 数值需 Qwen3.5-122B 评判模型 (本地没有)。此处给标准化关节视频 + 我按 KPS 三维度的肉眼结构化评估, 不冒充 122B 分数。
3. 这批预测来自 2026-06-05 的 ckpt + 自动分割 (非 GT mask), 当前训练仍在 step 46k/80k; 几何为灰模 (无纹理), 反映该 ckpt 质量。
1. PhysX-Bench (KPS) 测的是运动学合理性 (plausibility), 与 PAct 论文表里的 GT 几何指标 (dgIoU/CD) 是两条不同的轴; 本页不等同于复现论文 Table 数字。
2. 完整 KPS 数值需 Qwen3.5-122B 评判模型 (本地没有)。此处给标准化关节视频 + 我按 KPS 三维度的肉眼结构化评估, 不冒充 122B 分数。
3. 这批预测来自 2026-06-05 的 ckpt + 自动分割 (非 GT mask), 当前训练仍在 step 46k/80k; 几何为灰模 (无纹理), 反映该 ckpt 质量。
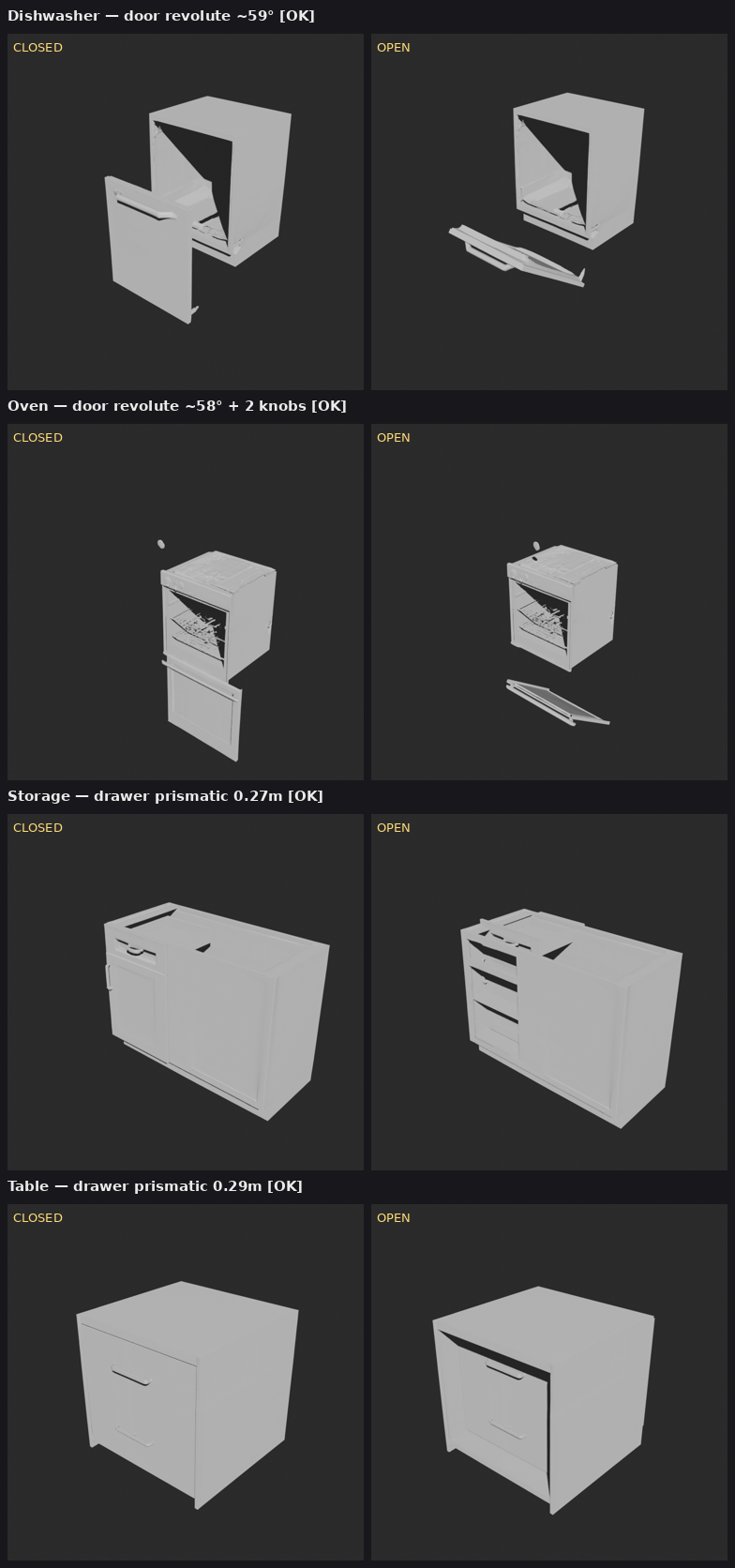
① 总览 (4 个有预测关节的物体, 闭/开)
② KPS 三维度诚实评估 (全 7 物体)
三维度即 PhysX-Bench KPS 子项: prior-part=可见部件是否按预期运动 | revealed=展开后露出的部件是否合理 | global=整体运动是否连贯。评级为我肉眼判定。
| 物体 | 预测关节 | prior-part | revealed | global | 总评 |
|---|---|---|---|---|---|
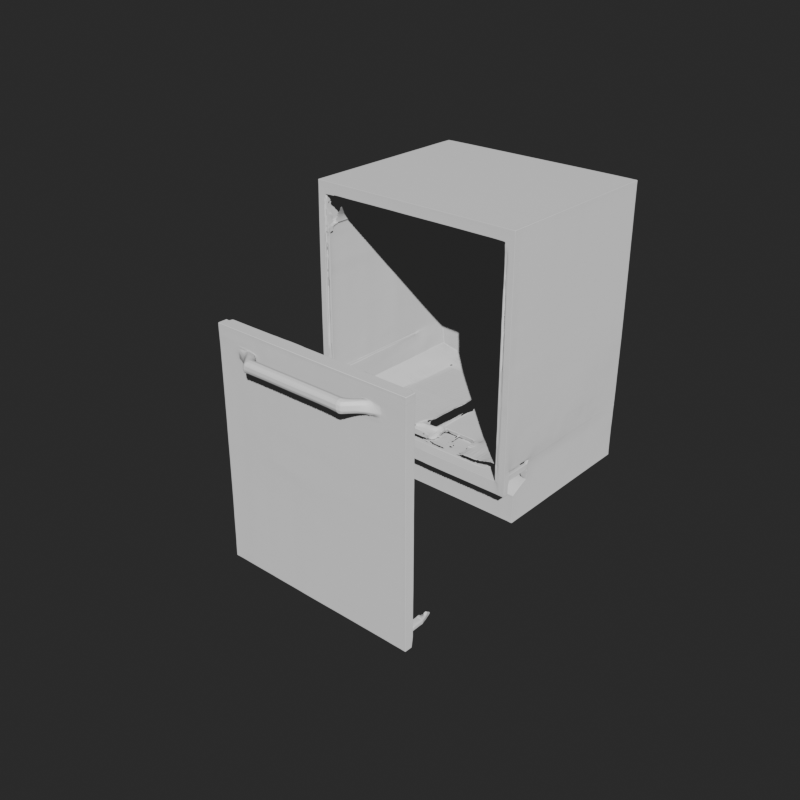
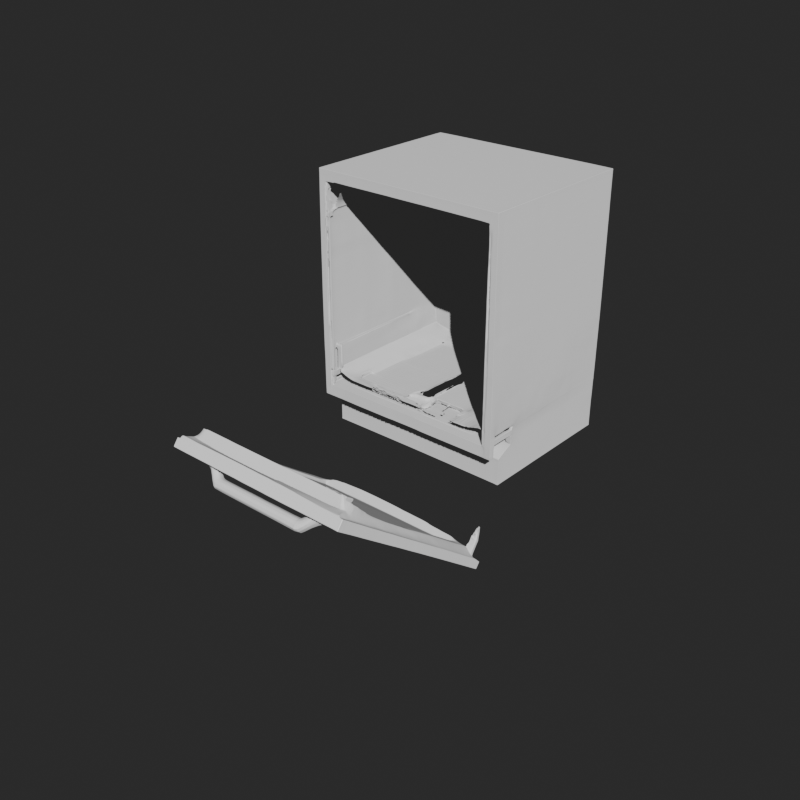
| Dishwasher | 门 revolute ~59° | ✓ 门下翻正确 | ✓ 露内腔 | ✓ | 合理 |
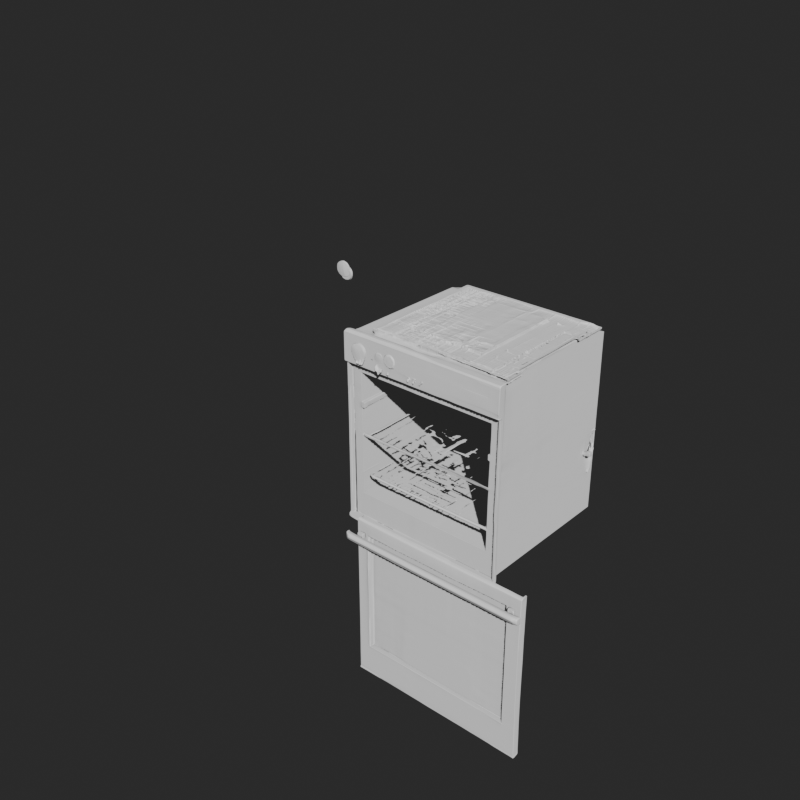
| Oven | 门 revolute ~58° + 2 旋钮 continuous | ✓ 门开+旋钮转 | ✓ | ✓ | 合理 |
| Storage | 抽屉 prismatic 0.27m | ✓ 抽屉滑出 | ~ 内部空 | ✓ | 合理 |
| Table | 抽屉 prismatic 0.29m | ✓ 抽屉滑出 | ~ 内部空 | ✓ | 合理 |
| Microwave | 仅 1 部件, 全 fixed | ✗ 漏门 | ✗ | ✗ | 漏判关节 |
| Refrigerator | 2 部件全 fixed | ✗ 漏门 | ✗ | ✗ | 漏判关节 |
| WashingMachine | 2 部件全 fixed | ✗ 漏门/盖 | ✗ | ✗ | 漏判关节 |
结论 (诚实): 7 个域内物体里 4/7 预测出合理关节 (洗碗机/烤箱门、储物柜/桌抽屉, 运动学方向正确); 3/7 (微波炉/冰箱/洗衣机) 把本该有门的物体预测成全 fixed = 漏判关节。
这与训练损失图的发现一致 (axis 几何项残差最大), 也印证 v0.3 改动1 (逐部件关节头) + 改动2 (几何/类别正确 loss) 的必要性。
③ 逐件: 闭/开 + KPS 关节视频
Dishwasher — 门 revolute
Oven — 门 revolute + 旋钮

Storage — 抽屉 prismatic
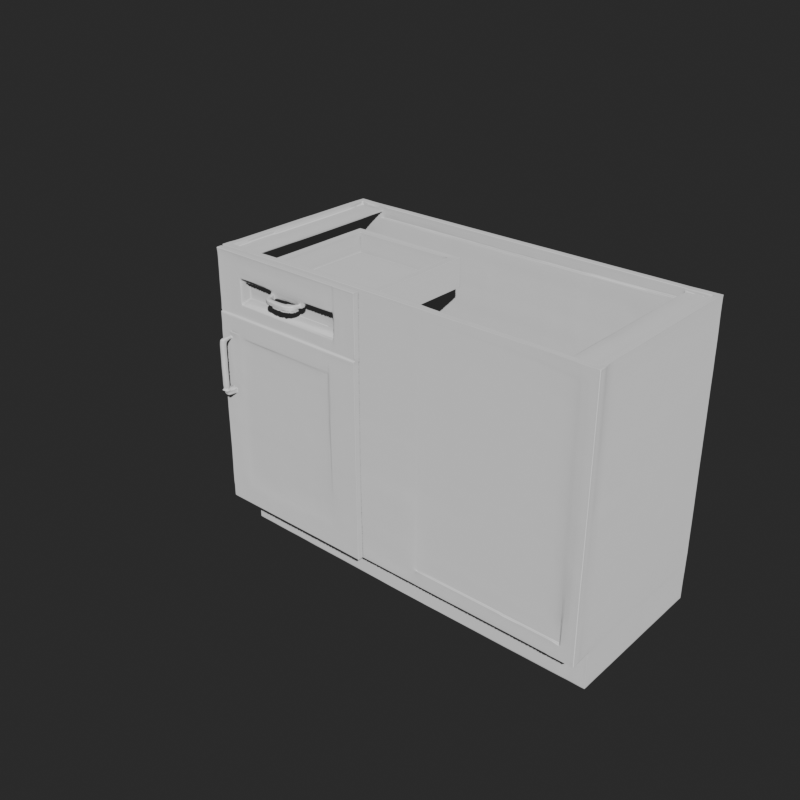
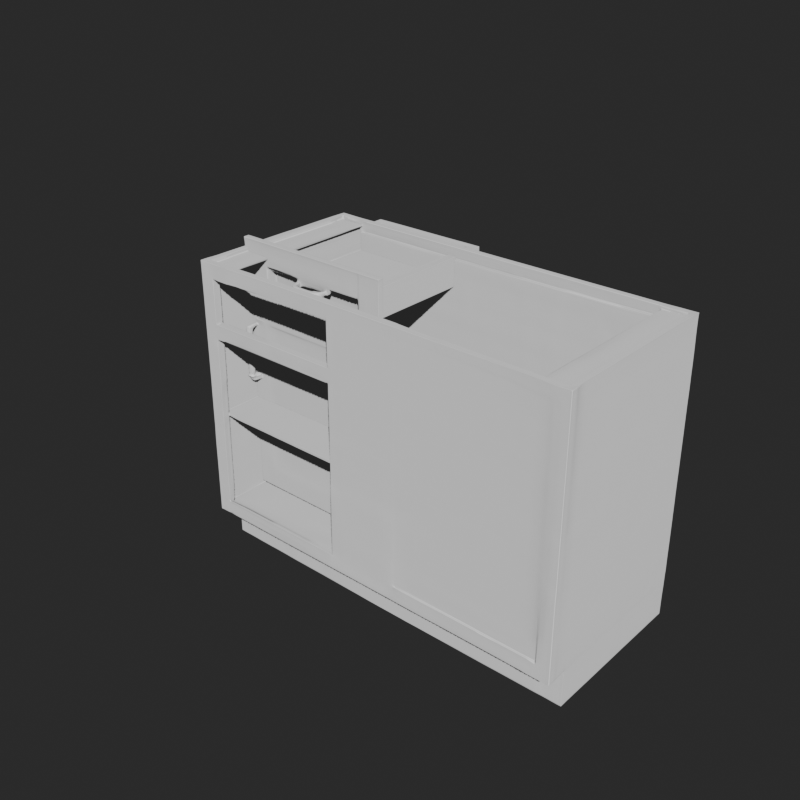
Table — 抽屉 prismatic


④ 漏判关节的 3 件 (KPS 视频显示无运动)
这 3 件被预测为全 fixed, 视频中物体不动 — 诚实呈现失败案例。
Microwave (漏门)
Refrigerator (漏门)
WashingMachine (漏门/盖)
产物: PAct_repro_20260603/eval_physxbench/ (URDF + verify_*.png/glb + _kps_videos)。
管线: diffuse_tree2urdf.py → fk_export.py/blender_render_glb.py → kinematic_articulation_demo.py。
评测状态文档: reports/PAct_eval_vs_official_20260608.md。