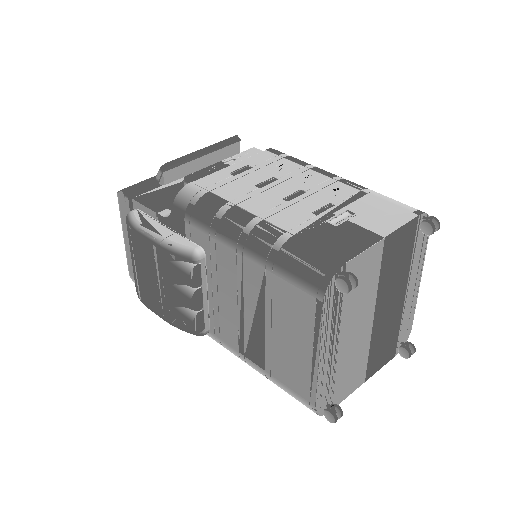
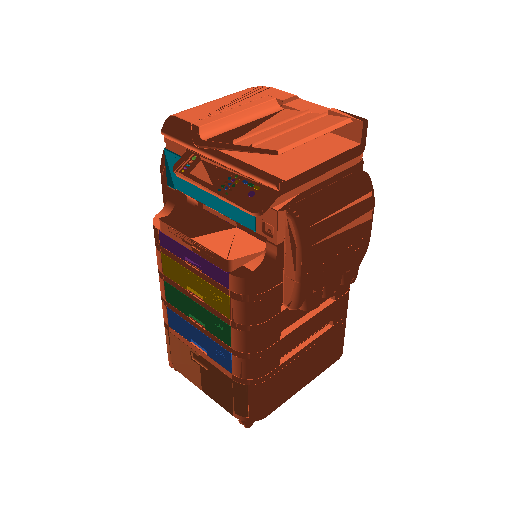
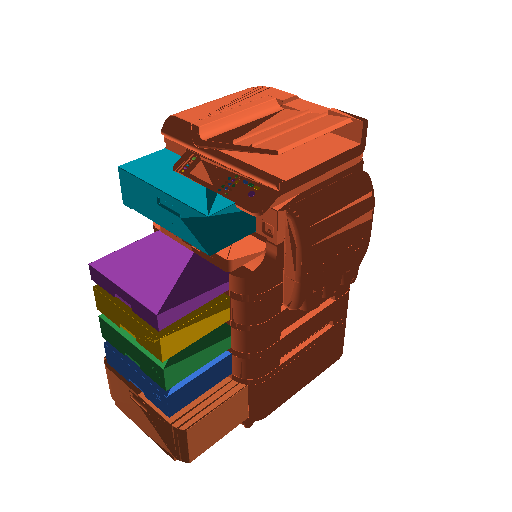
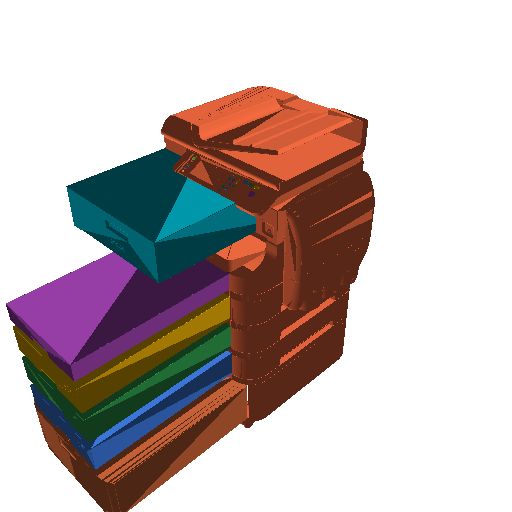
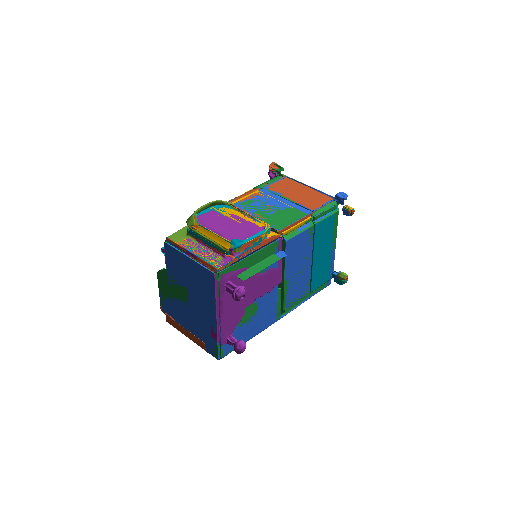
A. Part count correct, joint semantics wrong
PAct 能重建外形/part 数,但从 part 到 joint type、axis、range 的绑定不稳定。
part MAE≈0,但 joint F1 低、axis=90 或 joint type 被替换。
benchmark_100_manifest.json raw/source SDF stats;
Raw GT = source-faithful SDF + raw mobility sidecar axes when available;
PAct output = exported articulated object.json。机器可读证据:report.json。
分类依据不是原始标题,而是 3D 视觉差异、part/joint count、joint F1、joint type accuracy、axis error 和 scale consistency 的组合。
PAct 能重建外形/part 数,但从 part 到 joint type、axis、range 的绑定不稳定。
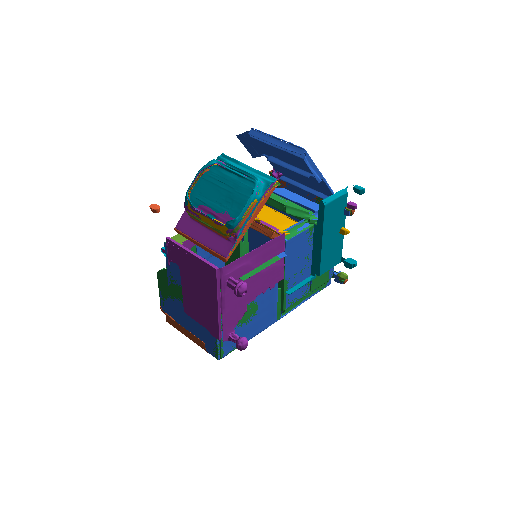
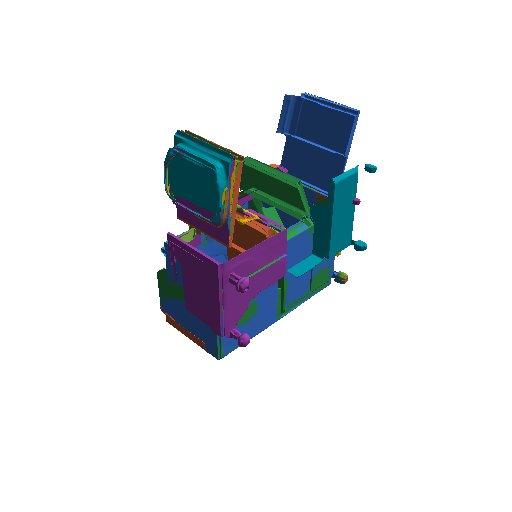
单视角下看不见的内部 movable 和拥挤小 part 是主要 recall 风险。
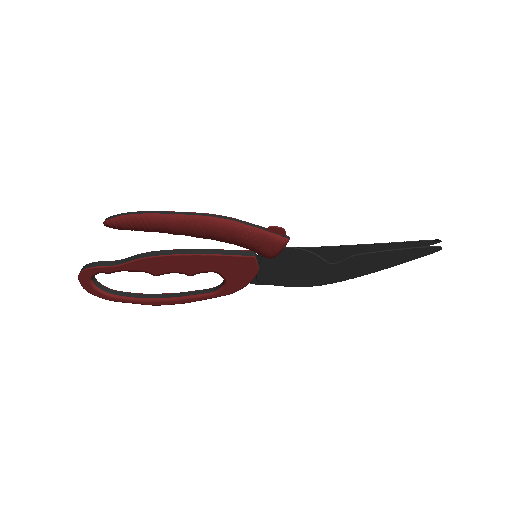
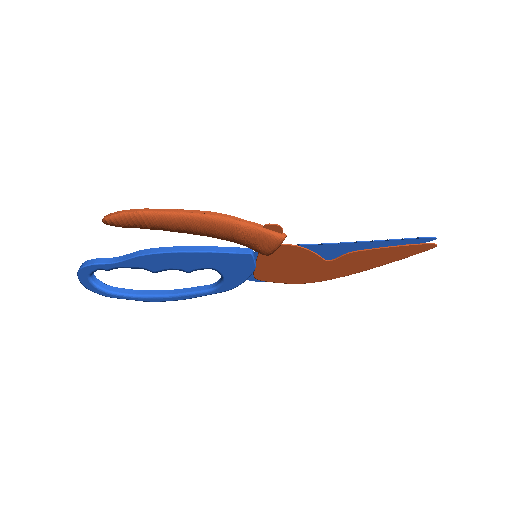
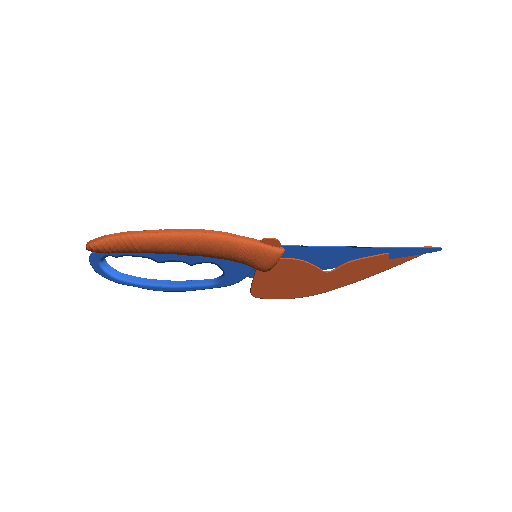
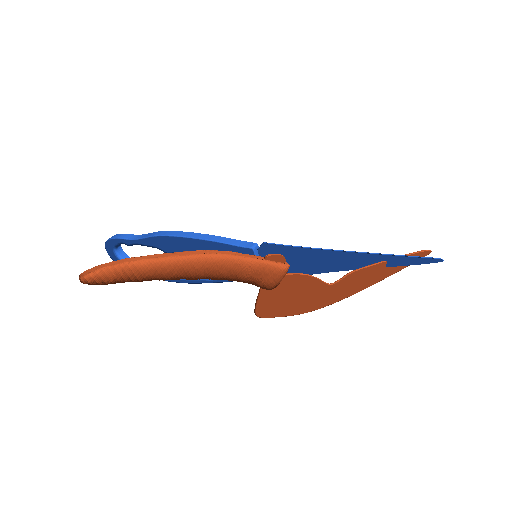
剪刀类薄结构既考验 part mask,也考验对非 PM 数据的 articulation 先验。
跨源窗户不是纯失败,更像几何尺度与 part correspondence 没对齐。
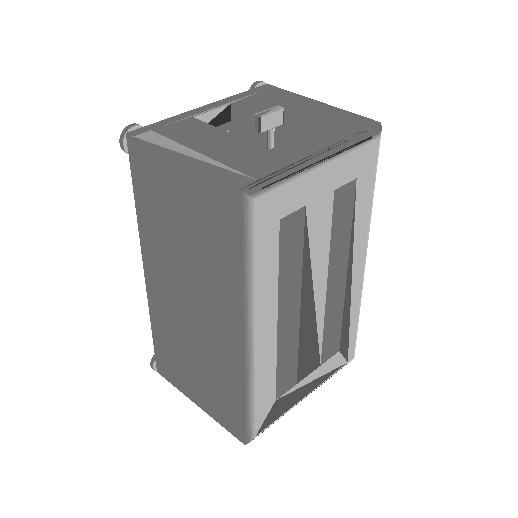
清晰单一 revolute、mask/part 简单时,PAct 可以给出可信运动学。
| # | sample | primary class | secondary signal | part/joint MAE | F1 | axis | scale |
|---|---|---|---|---|---|---|---|
| #73 | 复杂物体 / high part count | part 对了,运动学绑定错 | many-part prismatic collapse | 0 / 8 | 0.077 | 24.2° | 0.601 |
| #19 | OOD / GRScenes window | 轴向基本对,但尺度/对应不稳 | partial success | 0 / 0 | 0.333 | 2.3° | 0.437 |
| #72 | 自遮挡 / 多 movable | 遮挡/密集小件被漏或合并 | internal movable recall | 0 / 4 | 0.222 | 2.2° | 0.738 |
| #35 | 薄小 part / scissors | 薄结构跨域失败 | thin part articulation | 0 / 1 | 0 | 90° | 0.249 |
| #58 | 关节参数错配 | part 对了,运动学绑定错 | prismatic→revolute substitution | 0 / 0 | 0 | 90° | 0.613 |
| #62 | mask ablation 原始 mask | 清晰单轴正例 | clean single revolute | 0 / 0 | 1 | 0° | 0.53 |
| #4 | 拓扑 / part 合并 | 遮挡/密集小件被漏或合并 | small dense part merge | 3 / 4 | 0.333 | 8.8° | 0.723 |
| #67 | 简单样本回归 | part 对了,运动学绑定错 | continuous substitution | 0 / 0 | 0 | 90° | 0.605 |
| #22 | 纹理 / 外观歧义 | part 对了,运动学绑定错 | texture/thin panel ambiguity | 0 / 0 | 0 | 90° | 0.286 |
| # | sample | Source GT | Raw GT | PAct output | score | joint F1 | axis° |
|---|---|---|---|---|---|---|---|
| 1 | PartNetMobility/electronics/3811 | 33 links / 32 joints / 30 movable | 31 parts / 30 joints / 30 movable | 31 parts / 30 joints / 25 movable | 44.3 | 0.077 | 24.167 |
| 2 | GRScenes/architectural_fixtures/grscenes_window_836a30a6ddbf_ef632e | 5 links / 4 joints / 3 movable | 4 parts / 3 joints / 3 movable | 4 parts / 3 joints / 3 movable | 52.52 | 0.333 | 2.286 |
| 3 | PartNetMobility/major_appliances/283 | 14 links / 13 joints / 11 movable | 12 parts / 11 joints / 11 movable | 12 parts / 11 joints / 8 movable | 52.6 | 0.222 | 2.195 |
| 4 | ArtVIP/household_items/model_scissors_23 | 4 links / 3 joints / 2 movable | 3 parts / 2 joints / 2 movable | 3 parts / 2 joints / 1 movable | 35.5 | 0 | 90 |
| 5 | PartNetMobility/small_appliances/3483 | 4 links / 3 joints / 1 movable | 2 parts / 1 joints / 1 movable | 2 parts / 1 joints / 1 movable | 41.26 | 0 | 90 |
| 6 | PartNetMobility/small_appliances/1436 | 4 links / 3 joints / 1 movable | 2 parts / 1 joints / 1 movable | 2 parts / 1 joints / 1 movable | 82.05 | 1 | 0 |
| 7 | GAPartNet/small_appliances/103101 | 14 links / 13 joints / 11 movable | 12 parts / 11 joints / 11 movable | 9 parts / 8 joints / 8 movable | 51.77 | 0.333 | 8.763 |
| 8 | PartNetMobility/household_fixtures/915 | 4 links / 3 joints / 1 movable | 2 parts / 1 joints / 1 movable | 2 parts / 1 joints / 1 movable | 41.13 | 0 | 90 |
| 9 | ArtVIP/household_items/model_folder_25 | 3 links / 2 joints / 1 movable | 2 parts / 1 joints / 1 movable | 2 parts / 1 joints / 1 movable | 36.09 | 0 | 90 |
PAct 能重建外形/part 数,但从 part 到 joint type、axis、range 的绑定不稳定。
| count | joint types | |
|---|---|---|
| Source GT | 33 links / 32 joints / 30 movable | fixed:2, prismatic:30, revolute:0 |
| Raw GT | 31 parts / 30 joints / 30 movable | fixed:1, prismatic:30 |
| PAct output | 31 parts / 30 joints / 25 movable | continuous:3, fixed:6, prismatic:7, revolute:12, screw:3 |
| score | 44.3 |
| part MAE | 0 |
| joint MAE | 8 |
| joint F1 | 0.077 |
| axis deg | 24.167 |
| origin | 0 |
| id | name | type | range | open |
|---|---|---|---|---|
| 24 | link_24 | prismatic | [0, 0.89] | 0.89 |
| 25 | drawer | prismatic | [0, 0.89] | 0.89 |
| 26 | drawer | prismatic | [0, 0.89] | 0.89 |
| 27 | drawer | prismatic | [0, 0.89] | 0.89 |
| 28 | drawer | prismatic | [0, 0.89] | 0.89 |
| id | name | type | range | open |
|---|---|---|---|---|
| 6 | knob | continuous | [0, 360] | 6.2832 |
| 8 | knob | continuous | [0, 360] | 6.2832 |
| 30 | knob | continuous | [0, 360] | 6.2832 |
| 17 | door | revolute | [0, 106.4952] | 1.8587 |
| 13 | door | revolute | [0, -87.6358] | -1.5295 |
| count | joint types | |
|---|---|---|
| Source GT | 4 links / 3 joints / 1 movable | fixed:2, prismatic:1, revolute:0 |
| Raw GT | 2 parts / 1 joints / 1 movable | fixed:1, prismatic:1 |
| PAct output | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| score | 41.26 |
| part MAE | 0 |
| joint MAE | 0 |
| joint F1 | 0 |
| axis deg | 90 |
| origin | 0 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | door | prismatic | [0, 0.3] | 0.3 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | door | revolute | [0, 72.1715] | 1.2596 |
| count | joint types | |
|---|---|---|
| Source GT | 4 links / 3 joints / 1 movable | fixed:2, prismatic:0, revolute:1 |
| Raw GT | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| PAct output | 2 parts / 1 joints / 1 movable | continuous:1, fixed:1 |
| score | 41.13 |
| part MAE | 0 |
| joint MAE | 0 |
| joint F1 | 0 |
| axis deg | 90 |
| origin | 0 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | button | revolute | [0, 0.3644] | 0.3644 |
| id | name | type | range | open |
|---|---|---|---|---|
| 1 | knob | continuous | [0, 360] | 6.2832 |
| count | joint types | |
|---|---|---|
| Source GT | 3 links / 2 joints / 1 movable | fixed:1, prismatic:0, revolute:1 |
| Raw GT | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| PAct output | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| score | 36.09 |
| part MAE | 0 |
| joint MAE | 0 |
| joint F1 | 0 |
| axis deg | 90 |
| origin | 0 |



| id | name | type | range | open |
|---|---|---|---|---|
| 1 | knob | revolute | [-1.3963, 0] | -1.3963 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | door | revolute | [0, -69.1238] | -1.2064 |
单视角下看不见的内部 movable 和拥挤小 part 是主要 recall 风险。
| count | joint types | |
|---|---|---|
| Source GT | 14 links / 13 joints / 11 movable | fixed:2, prismatic:9, revolute:2 |
| Raw GT | 12 parts / 11 joints / 11 movable | fixed:1, prismatic:9, revolute:2 |
| PAct output | 12 parts / 11 joints / 8 movable | continuous:4, fixed:4, prismatic:1, revolute:2, screw:1 |
| score | 52.6 |
| part MAE | 0 |
| joint MAE | 4 |
| joint F1 | 0.222 |
| axis deg | 2.195 |
| origin | 0.537 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | door | revolute | [-0, 1.5708] | 1.5708 |
| 6 | knob | revolute | [-1.5708, 1.5708] | 1.5708 |
| 1 | button | prismatic | [0, 0.002] | 0.002 |
| 5 | button | prismatic | [0, 0.002] | 0.002 |
| 7 | button | prismatic | [0, 0.002] | 0.002 |
| id | name | type | range | open |
|---|---|---|---|---|
| 8 | knob | continuous | [0, 360] | 6.2832 |
| 9 | knob | continuous | [0, 360] | 6.2832 |
| 10 | knob | continuous | [0, 360] | 6.2832 |
| 11 | knob | continuous | [0, 360] | 6.2832 |
| 6 | drawer | revolute | [0, -28.9682] | -0.5056 |
| count | joint types | |
|---|---|---|
| Source GT | 14 links / 13 joints / 11 movable | fixed:2, prismatic:8, revolute:3 |
| Raw GT | 12 parts / 11 joints / 11 movable | fixed:1, prismatic:8, revolute:3 |
| PAct output | 9 parts / 8 joints / 8 movable | continuous:1, fixed:1, prismatic:1, revolute:5, screw:1 |
| score | 51.77 |
| part MAE | 3 |
| joint MAE | 4 |
| joint F1 | 0.333 |
| axis deg | 8.763 |
| origin | 0.295 |
| id | name | type | range | open |
|---|---|---|---|---|
| 8 | knob | revolute | [-2.796, 2.8965] | 2.8965 |
| 9 | knob | revolute | [-2.2934, 2.4944] | 2.4944 |
| 10 | knob | revolute | [-0.8727, 0.8727] | 0.8727 |
| 0 | button | prismatic | [0, 0.004] | 0.004 |
| 1 | button | prismatic | [0, 0.004] | 0.004 |
| id | name | type | range | open |
|---|---|---|---|---|
| 4 | knob | continuous | [0, 360] | 6.2832 |
| 2 | door | revolute | [0, -80.1418] | -1.3987 |
| 3 | drawer | revolute | [0, -71.3568] | -1.2454 |
| 6 | door | revolute | [0, -40.2806] | -0.703 |
| 5 | door | revolute | [0, -37.6631] | -0.6573 |
剪刀类薄结构既考验 part mask,也考验对非 PM 数据的 articulation 先验。
| count | joint types | |
|---|---|---|
| Source GT | 4 links / 3 joints / 2 movable | fixed:1, prismatic:0, revolute:2 |
| Raw GT | 3 parts / 2 joints / 2 movable | fixed:1, revolute:2 |
| PAct output | 3 parts / 2 joints / 1 movable | fixed:2, revolute:1 |
| score | 35.5 |
| part MAE | 0 |
| joint MAE | 1 |
| joint F1 | 0 |
| axis deg | 90 |
| origin | 0 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | e_scissors_2_1 | revolute | [0, 0.3491] | 0.3491 |
| 1 | e_scissors_1_4 | revolute | [0, 0.3491] | 0.3491 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | door | revolute | [0, -55.4495] | -0.9678 |
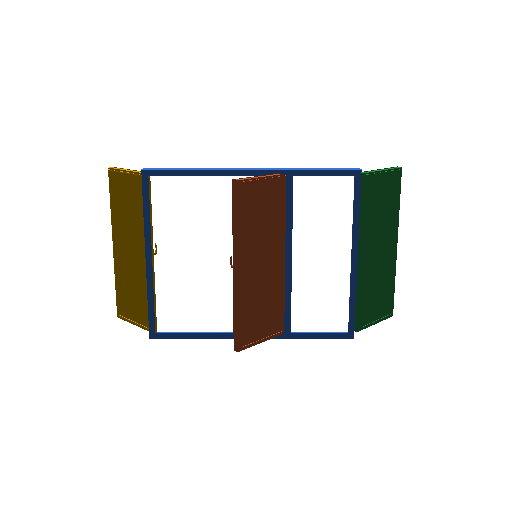
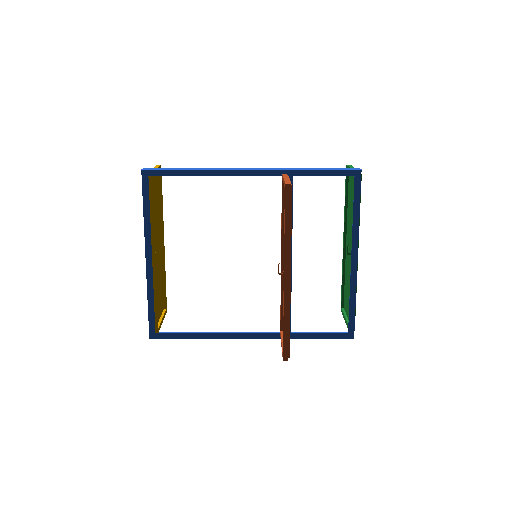
跨源窗户不是纯失败,更像几何尺度与 part correspondence 没对齐。
| count | joint types | |
|---|---|---|
| Source GT | 5 links / 4 joints / 3 movable | fixed:1, prismatic:0, revolute:3 |
| Raw GT | 4 parts / 3 joints / 3 movable | fixed:1, revolute:3 |
| PAct output | 4 parts / 3 joints / 3 movable | continuous:1, fixed:1, revolute:2 |
| score | 52.52 |
| part MAE | 0 |
| joint MAE | 0 |
| joint F1 | 0.333 |
| axis deg | 2.286 |
| origin | 0.989 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | group_4115236e_dc8c_4cba | revolute | [0, 1.5708] | 1.5708 |
| 2 | group_b351fc1a_6aaf_463c | revolute | [0, 1.5708] | 1.5708 |
| 3 | group_bacc9198_80c9_4c2e | revolute | [0, 1.5708] | 1.5708 |
| id | name | type | range | open |
|---|---|---|---|---|
| 3 | knob | continuous | [0, 360] | 6.2832 |
| 2 | door | revolute | [0, 84.6914] | 1.4781 |
| 1 | door | revolute | [0, -71.389] | -1.246 |
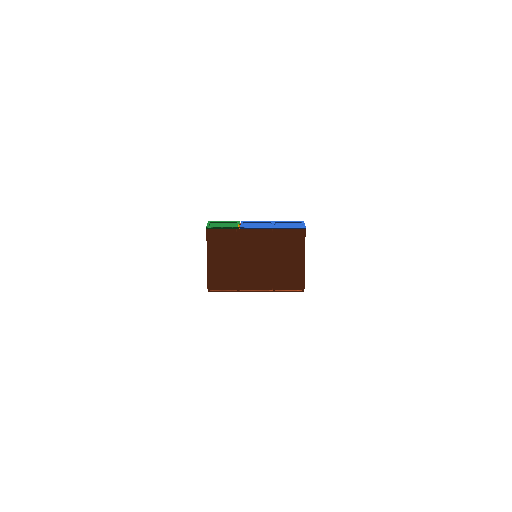
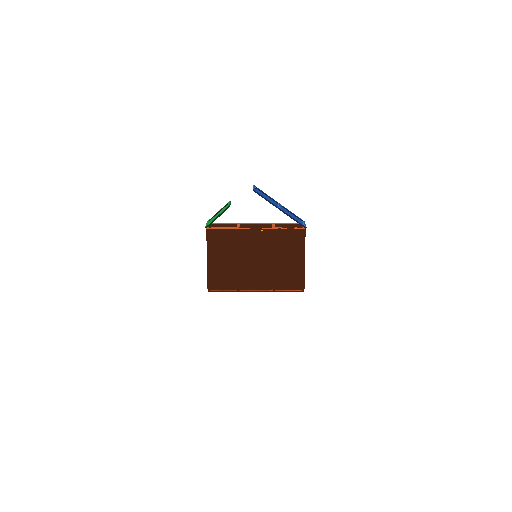
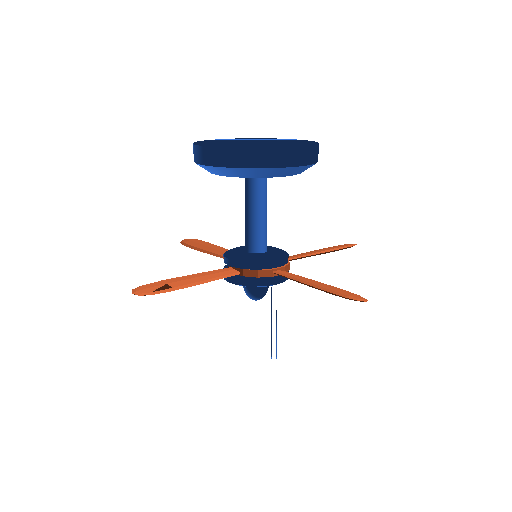
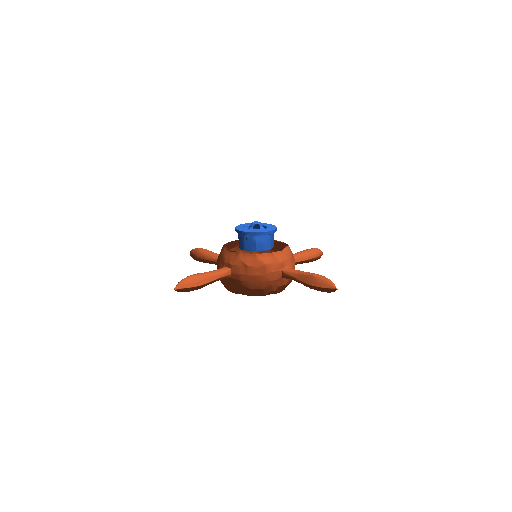
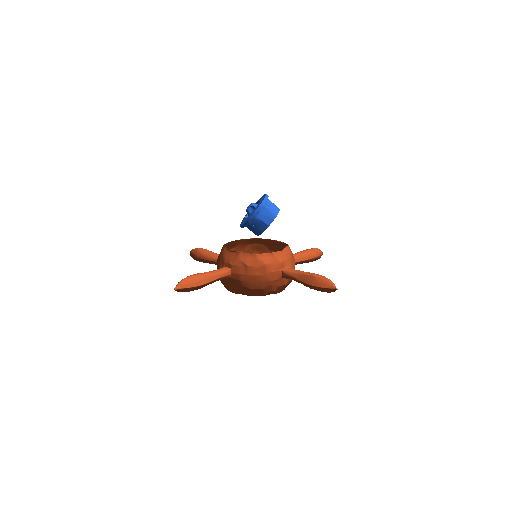
清晰单一 revolute、mask/part 简单时,PAct 可以给出可信运动学。
| count | joint types | |
|---|---|---|
| Source GT | 4 links / 3 joints / 1 movable | fixed:2, prismatic:0, revolute:1 |
| Raw GT | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| PAct output | 2 parts / 1 joints / 1 movable | fixed:1, revolute:1 |
| score | 82.05 |
| part MAE | 0 |
| joint MAE | 0 |
| joint F1 | 1 |
| axis deg | 0 |
| origin | 0.343 |

| variant | score | part MAE | joint F1 |
|---|---|---|---|
| mask_orig_62 | 82.05 | 0 | 1 |
| mask_maskzero_62 | 0 | 2 | 0 |
| mask_masknoise_62 | 82.04 | 0 | 1 |
| id | name | type | range | open |
|---|---|---|---|---|
| 0 | fan | revolute | [-1.5708, 1.5708] | 1.5708 |
| id | name | type | range | open |
|---|---|---|---|---|
| 1 | door | revolute | [0, -49.9098] | -0.8711 |
原始页面:pact-official-failure-modes-20260525。本页只复用其样本资产,不复用其文字判断。