Articraft operation_space pilot · 运动可操作空间
把单根 access_direction 升级为 operation_space:对每个可动部件,沿 URDF 关节行程采样若干位姿,
将运动子树扫过的点求并集 → 得到 扫掠包络 (swept AABB)、质心行程 与 间隙区域 (clearance)。
纯 URDF 运动学、确定性、无模型/无 GPU。仅 Articraft(HSSD 无关节,不在本 pilot)。
质量评估 · operation_space
按关节类型
| prismatic_travel | 47 |
| continuous_swept_unbounded | 31 |
| revolute_swept | 73 |
bounded(有 limit): 120 · unbounded(continuous, 取 0..2π): 31
几何统计
| 质心行程 (m) | min 0.0 · 中位 0.0322 · max 6.6 |
| 间隙体积 (m³) | min 3e-05 · 中位 0.0209 · max 256.65962 |
| 方法 / 置信 | kinematic_sweep · 0.85 bounded / 0.70 unbounded |
资产 40 · 可动部件 151
诚实告警 ·
① continuous(无界)关节按 0..2π 整圈扫掠估计包络,置信降到 0.70,且会产出偏大的扫体(远轴长臂绕一圈)——
间隙体积 max 是这类离群值,场景生成时应特判或截断。
② 间隙盒是 轴对齐 AABB + 4% 尺度余量的保守近似,非紧致凸包/扫体网格;真正紧的包络需后续做 swept-mesh。
③ 行程/包络来自 URDF 标注的 limit,继承源数据本身的标注质量。
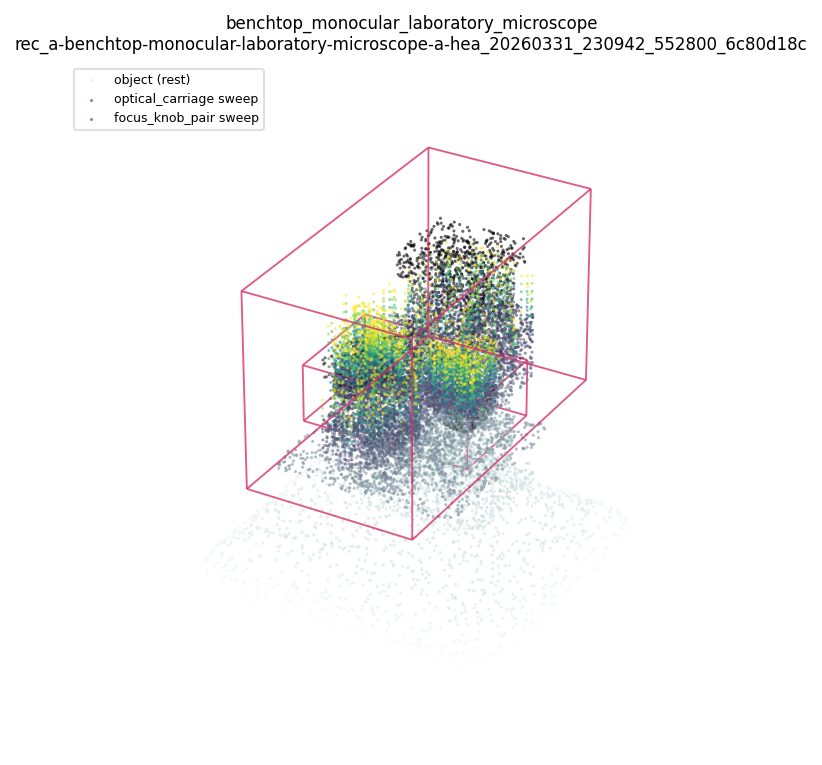
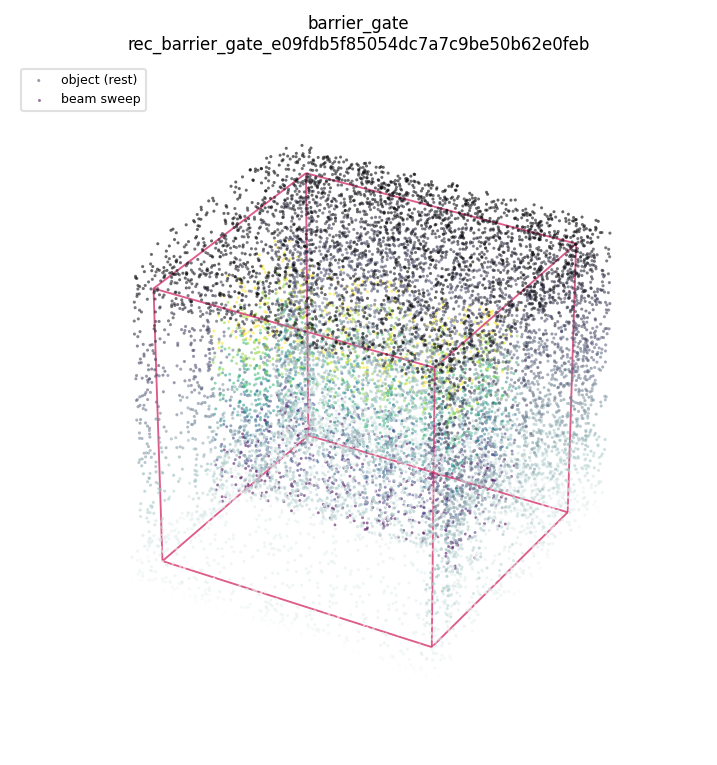
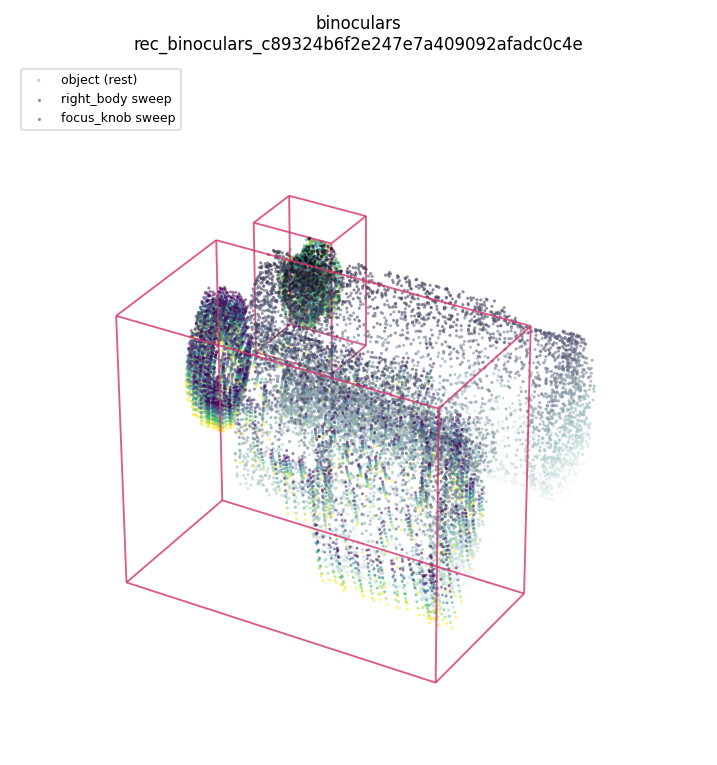
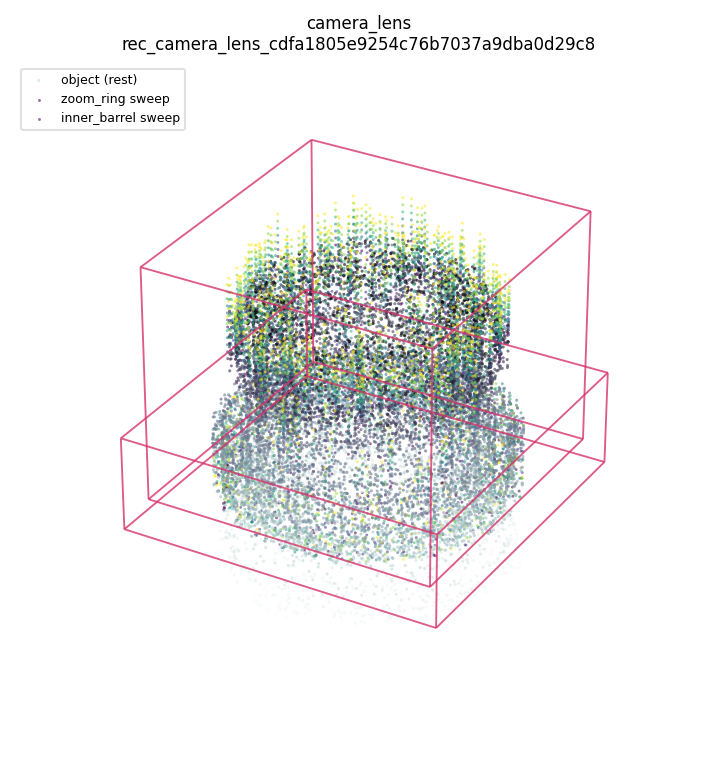
2 可动部件 · continuous_swept_unbounded, prismatic_travel
9 可动部件 · continuous_swept_unbounded, prismatic_travel

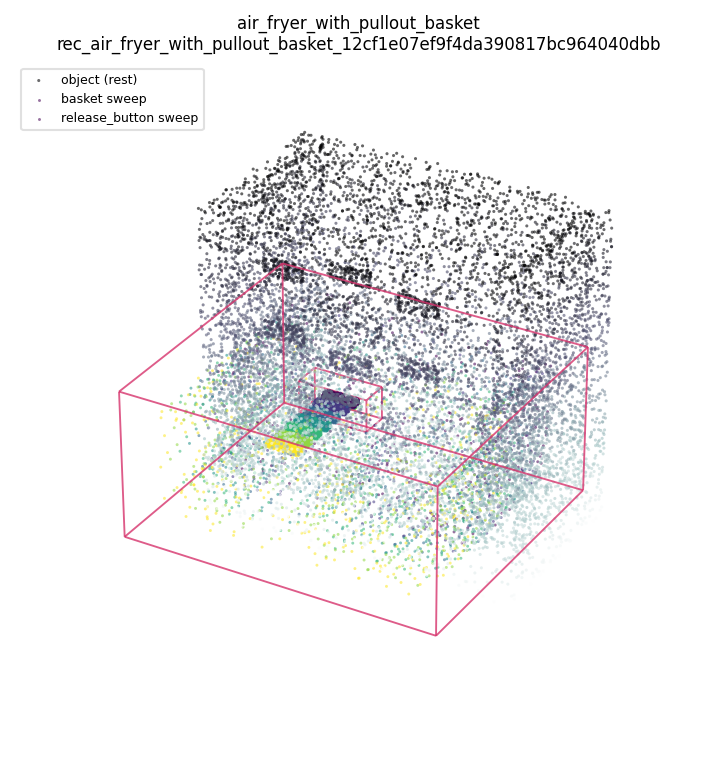
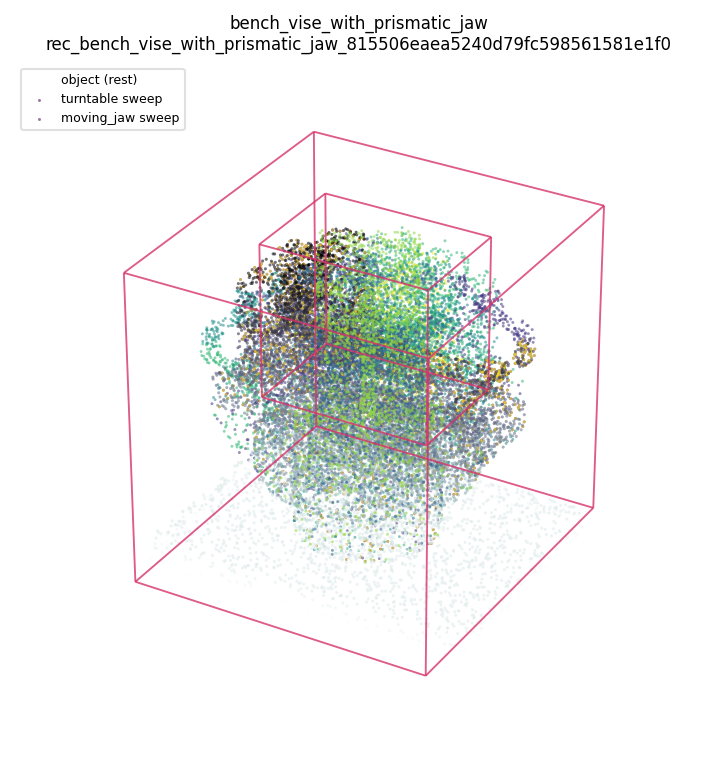
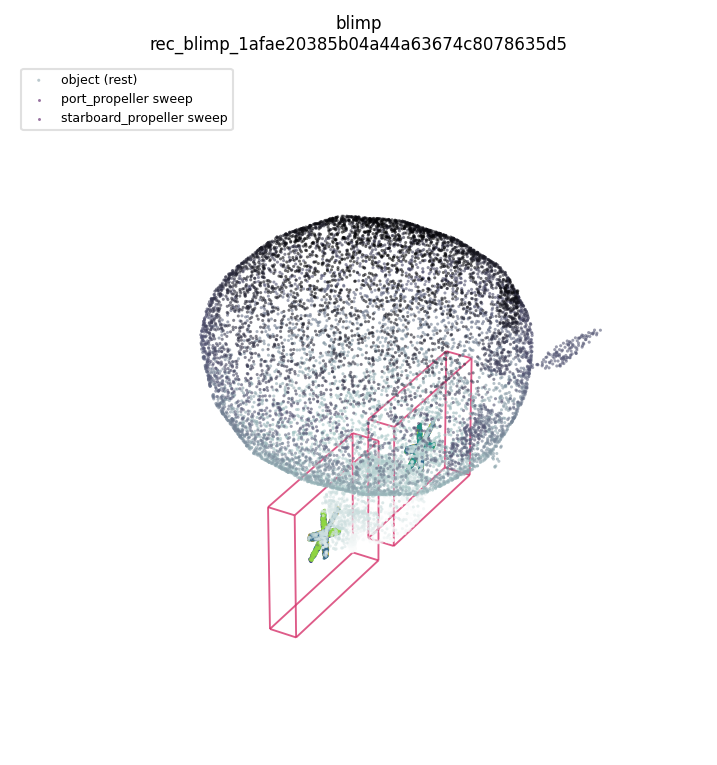
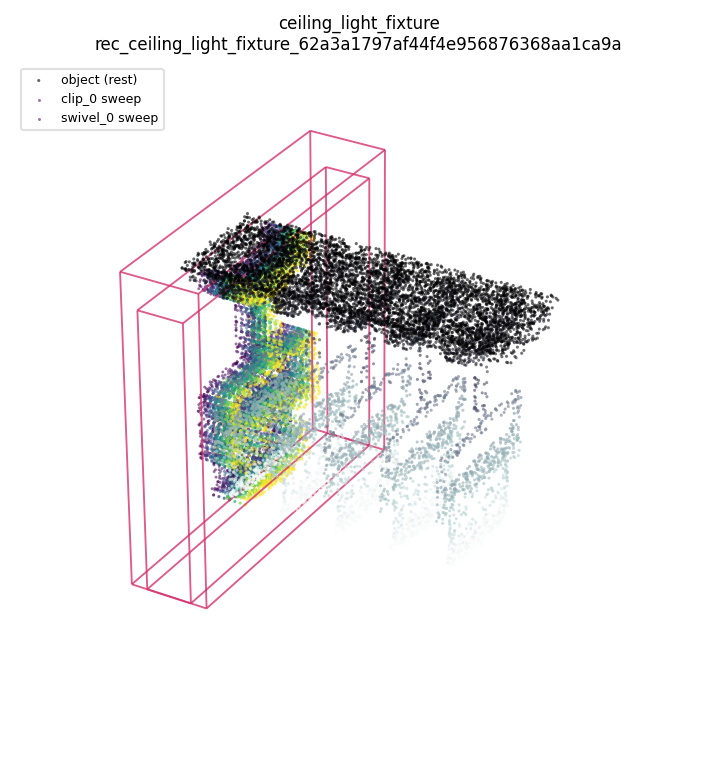
3 可动部件 · prismatic_travel, revolute_swept
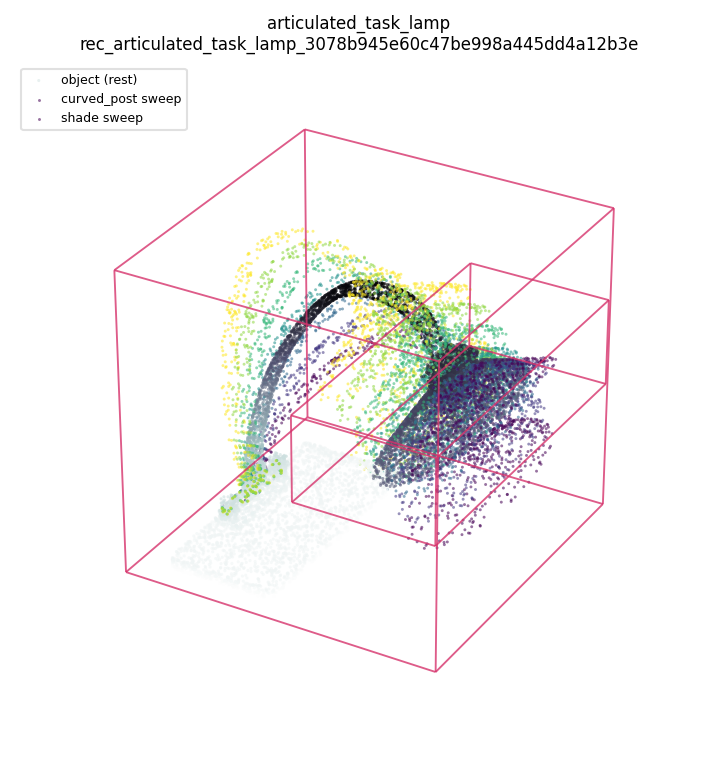
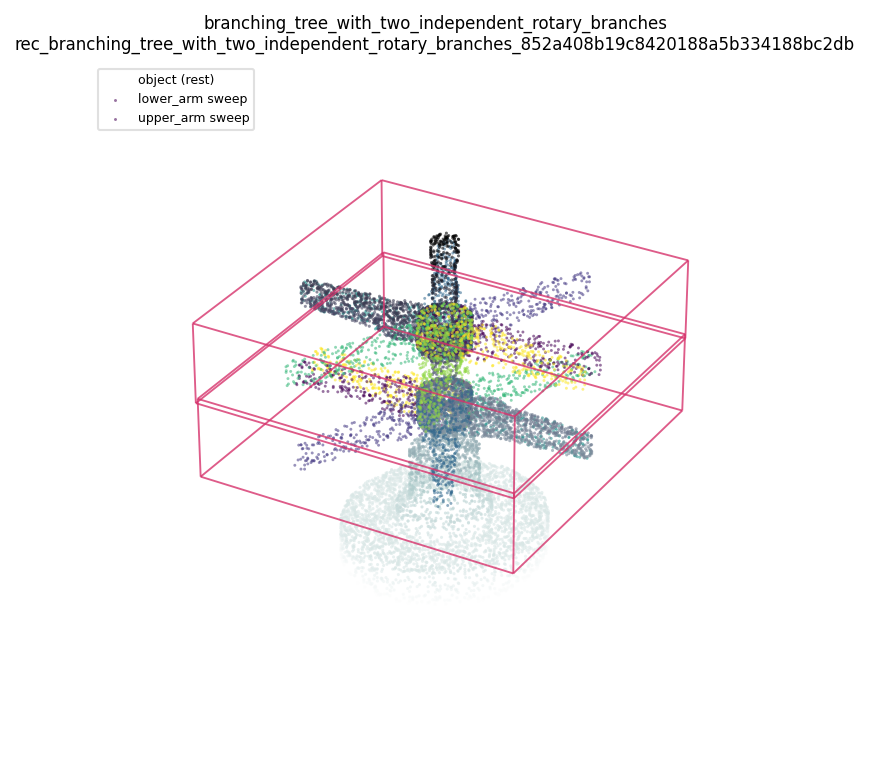
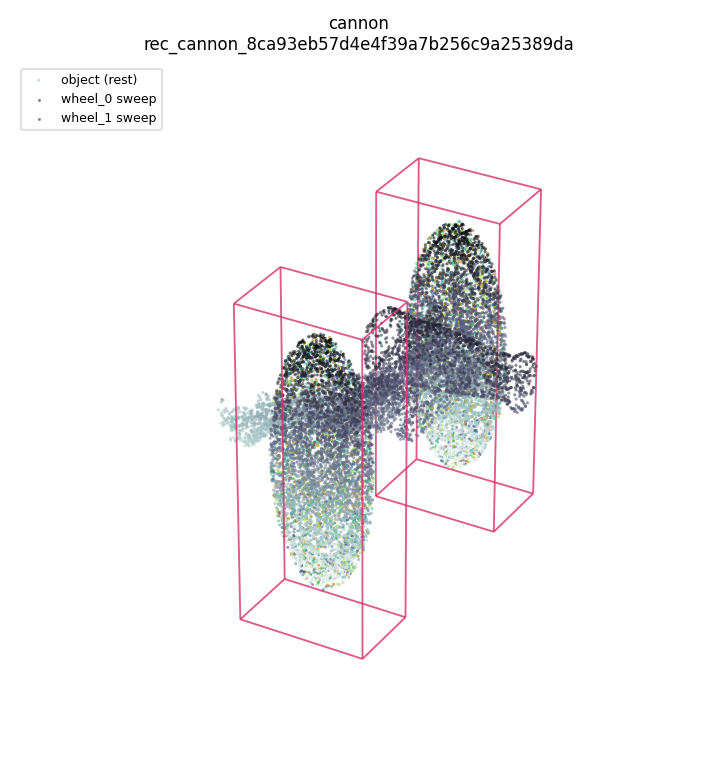
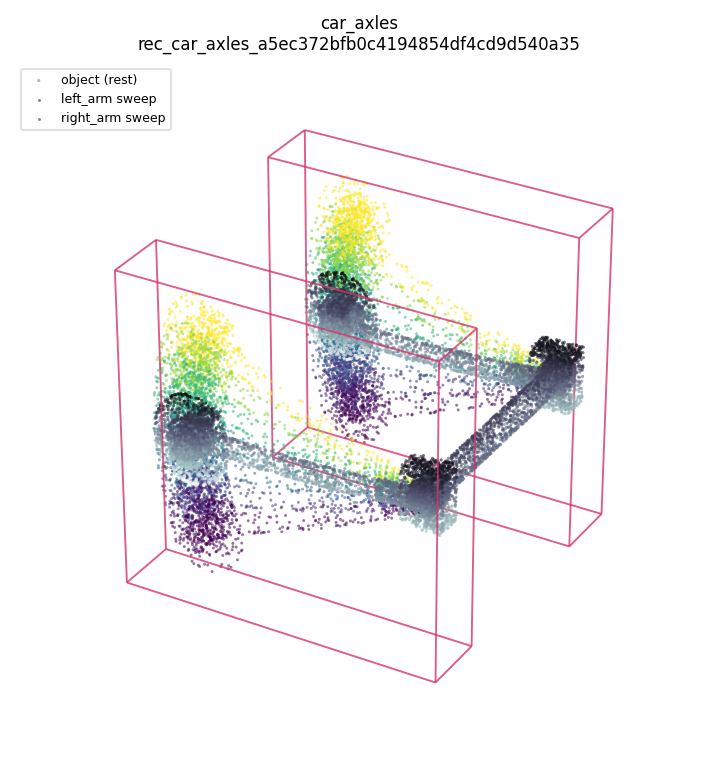
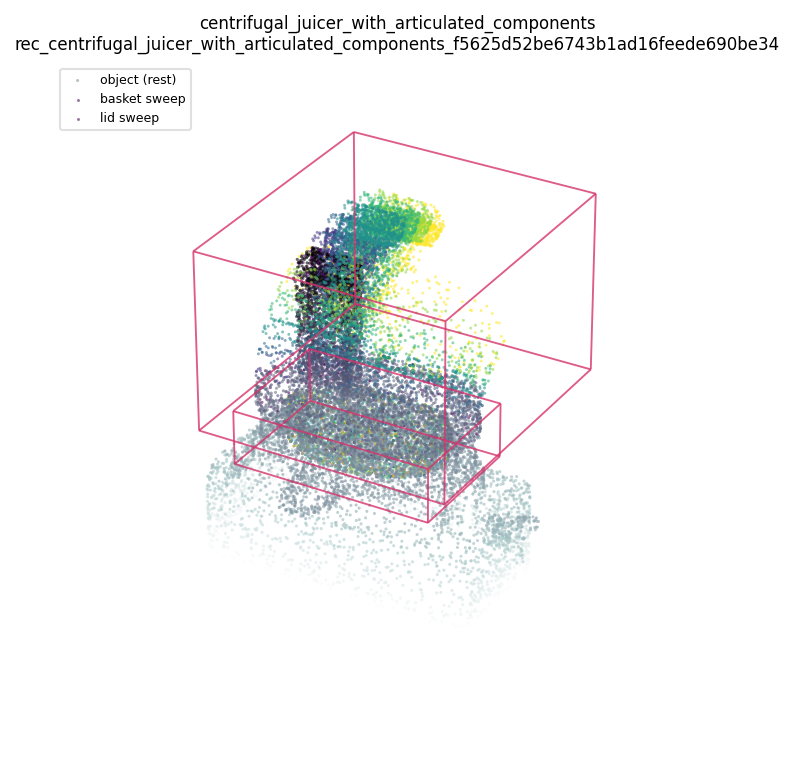
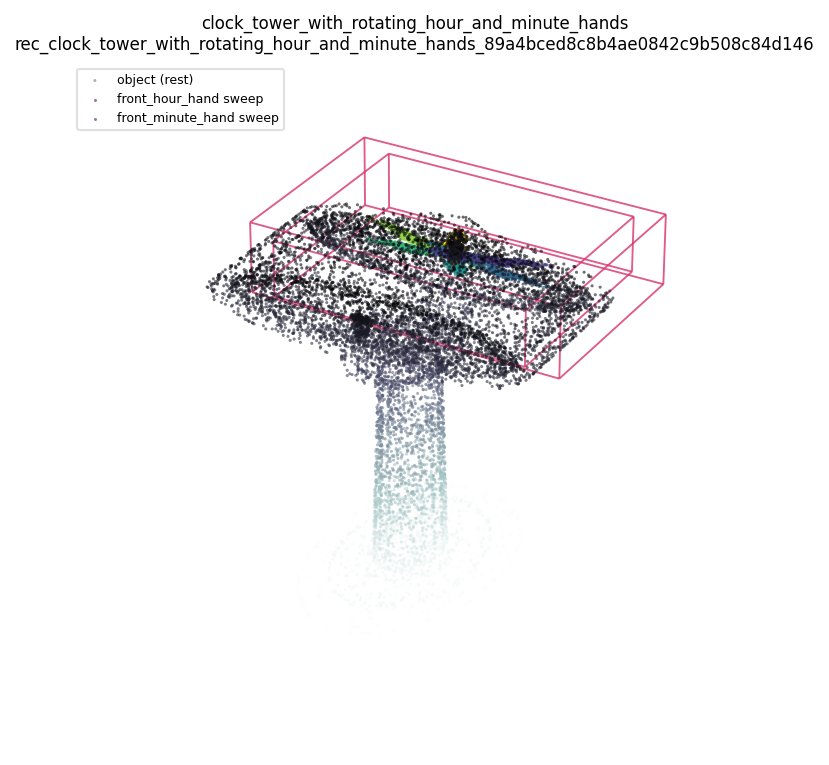
2 可动部件 · revolute_swept
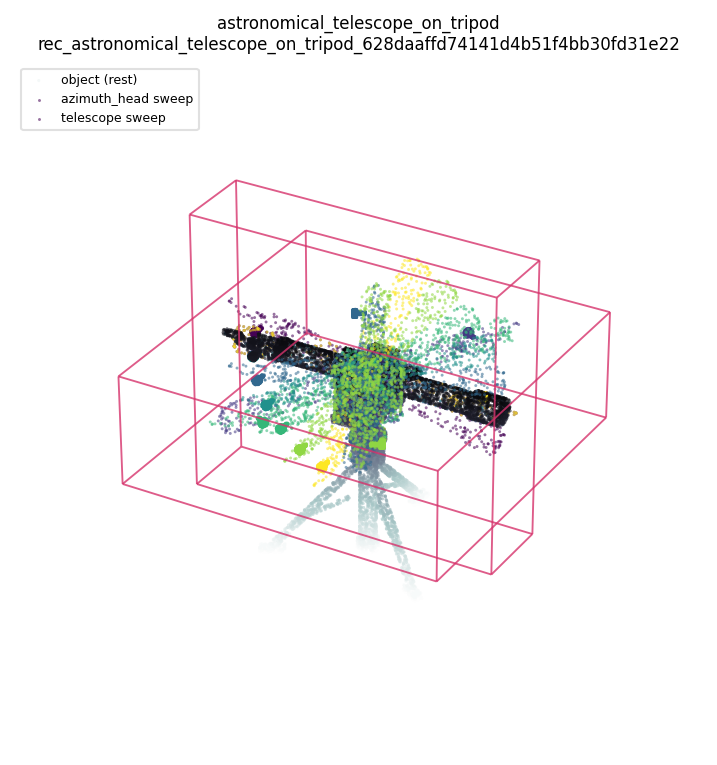
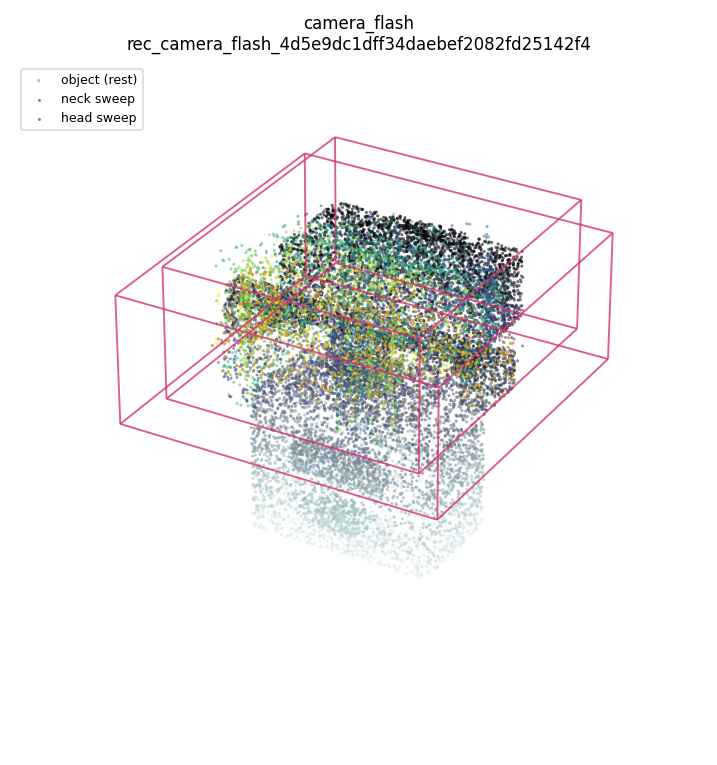
3 可动部件 · revolute_swept
1 可动部件 · prismatic_travel
3 可动部件 · continuous_swept_unbounded, prismatic_travel
5 可动部件 · continuous_swept_unbounded, revolute_swept
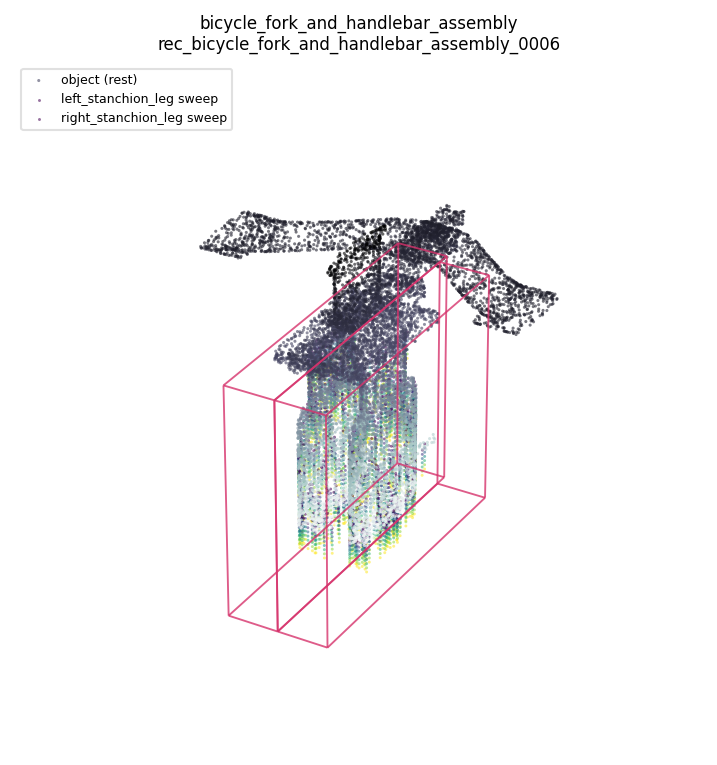
2 可动部件 · prismatic_travel
4 可动部件 · revolute_swept
7 可动部件 · continuous_swept_unbounded, revolute_swept

3 可动部件 · continuous_swept_unbounded, revolute_swept
2 可动部件 · revolute_swept
3 可动部件 · continuous_swept_unbounded, revolute_swept
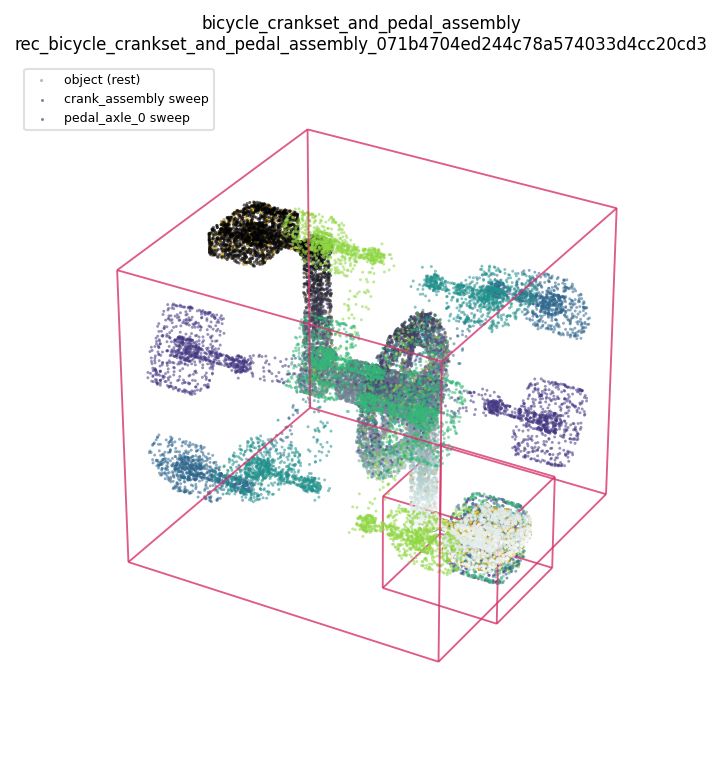
3 可动部件 · prismatic_travel, revolute_swept
4 可动部件 · continuous_swept_unbounded, revolute_swept
4 可动部件 · continuous_swept_unbounded, revolute_swept
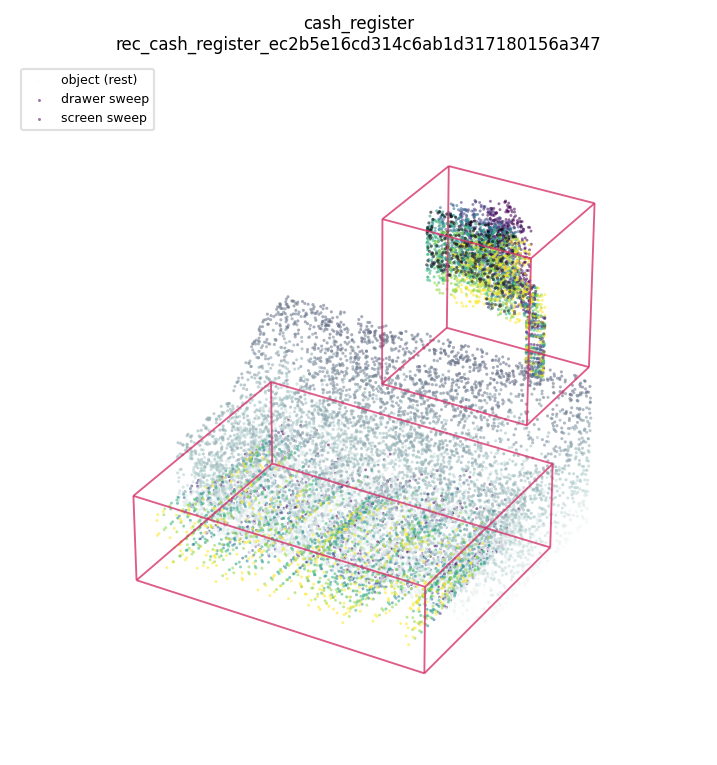
2 可动部件 · prismatic_travel, revolute_swept
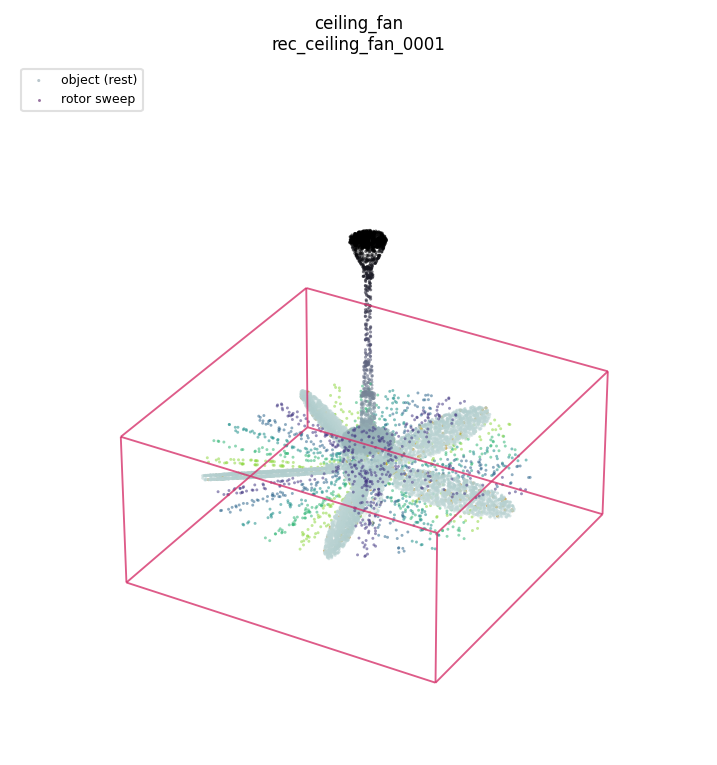
1 可动部件 · continuous_swept_unbounded
15 可动部件 · prismatic_travel, revolute_swept
5 可动部件 · continuous_swept_unbounded, prismatic_travel, revolute_swept
4 可动部件 · continuous_swept_unbounded
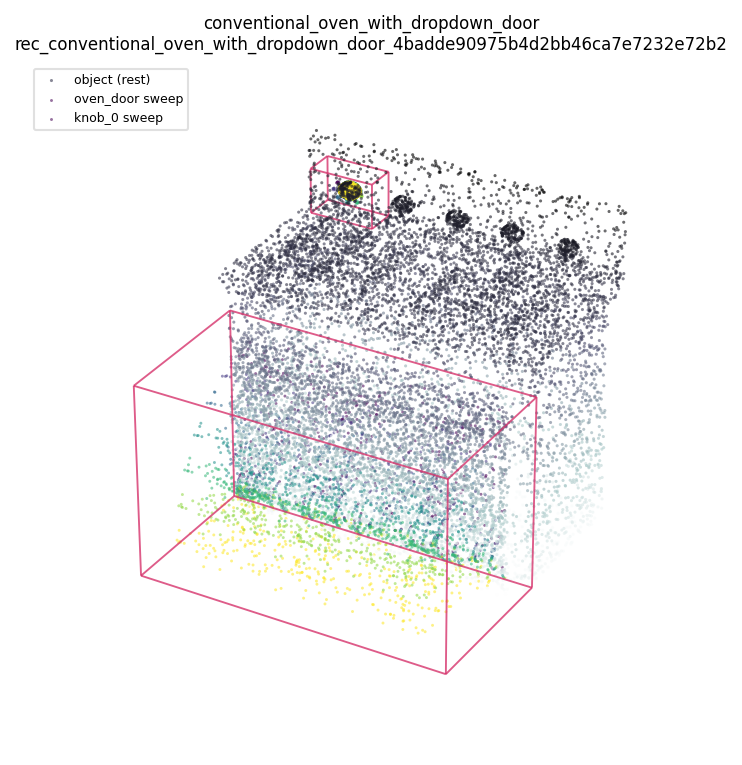
6 可动部件 · revolute_swept
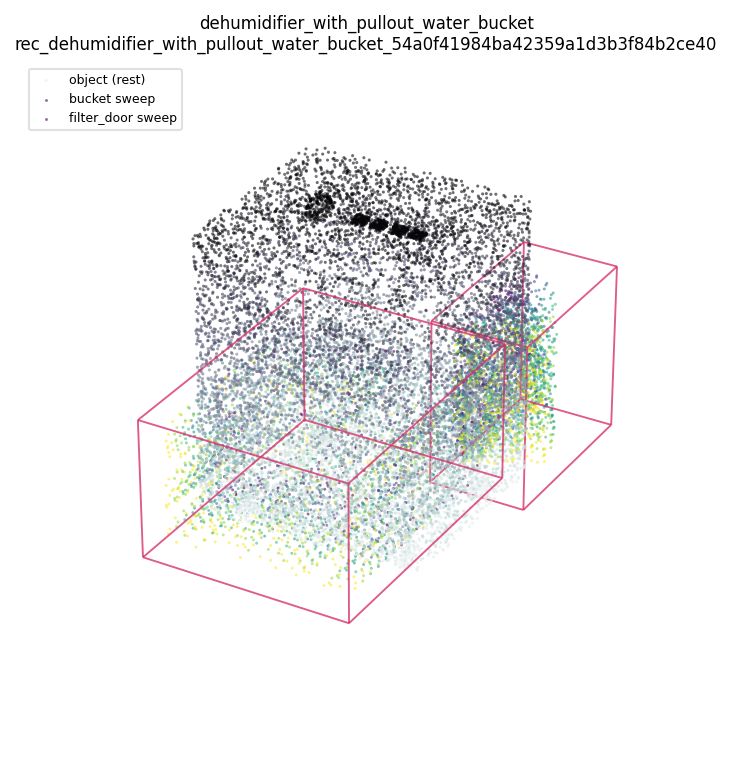
11 可动部件 · continuous_swept_unbounded, prismatic_travel, revolute_swept