非铰链物体净空标注 v2 · 人体锚定·有依据
方法版本 nonartic-clearance-v2-20260617 · 生成 2026-06-17 · 6096 个需净空 HSSD 非铰链物体
6092
已标注物体 (共 6092 条)
259
覆盖类目
3091
high 置信
1604
med 置信
1397
low 置信
535
小件继承门控
16
metric 可疑
0
load 失败
核心原则:净空锚在人体,不锚在物体。
纵深/高度取人体测量学常数(不随物体缩放),横向取逐实例物体面并 clamp 到肩宽/footprint。
每条标注带
basis(出处) + confidence + method_version,可追溯复核。
世界系: Z-up, front=-Y, X=right (米)。方法依据表 (五种净空型 × 人体测量学常数)
| 净空型 | 盒尺寸 (纵深/高度/横向) | 人体测量学依据 |
|---|---|---|
| 落座 (sit) | 纵深 0.6m · 高度 1.3m · 横向≥0.6m(footprint) | sit-to-stand 前向净空 P50 ~0.60m (Dreyfuss/ANSI-HFES100: 膝-臀+脚+前倾) |
| 接近 (reach) | 纵深 0.45m · 高度 1.8m · 横向≥0.52m(肩宽) | 站立够取身前空间 ~0.45m (P95 肩宽 0.52m + 余量) |
| 操作 (operate) | 纵深 0.40m · 高度=物体高+0.30m · 横向≥0.52m | 前臂功能可达 ~0.40m (手部操作, 无需整身进入) |
| 上方站立 (stand) | 垂直 1.9m · footprint=物体水平投影 | P95 站高 ~1.87m → 1.90m 垂直净空 (rug/mat/踏凳) |
| 通行 (passage) | 通道宽 0.7m · 高度 1.9m | 单人走廊最小净宽 0.70m (建筑循环空间规范) |
原则:纵深/高度=人体常数(不随物体缩放),横向=逐实例物体面 clamp。常数出处 Dreyfuss《The Measure of Man and Woman》/ ANSI-HFES 100 / 单人循环规范;每条标注落盘 basis 字段可复核。
详细标注规则(算法,逐物体)
| 步骤 | 规则 |
|---|---|
| ① 公制校验 | HSSD unit=meter;bbox 最大边 >5m 或 <0.02m → metric_flag=suspect 并降 low(16 件)。 |
| ② 小件继承门控 | 物体 max 边 <0.40m 且型∈{接近,操作} 且非 floor-standing → inherits_from_support=true,不打独立人体大盒(避免给开关/小台灯套 1.8m 盒=尺度爆炸+重复计),只记需求(535 件)。 |
| ③ 生成净空盒 | 盒贴 direction 面外侧;depth/height 用型常数,width 用该面宽 clamp,底贴该面下沿(地面/台面);direction=四周(对称无前)→生成环形净空。 |
| ④ 方向判定 | 类别先验 → 座椅类几何检测(高处质量集中侧=靠背→对侧为前)→ 失败退化四周;落盘组合 direction(前/四周/上/前+上…)。 |
| ⑤ 置信度 | high=人体常数+公制正常+方向几何可定;med=对称退化四周/清单中置信;low=清单 low 类/metric_suspect/多用途歧义。 |
输出 schema(每物体可追溯):object_id · category · clearance_type · direction · object_bbox_m · clearance_aabb · depth/width/height_m · basis(出处串) · metric_flag · confidence · inherits_from_support · world_frame(Z-up,front=-Y) · method_version。
资产统计(板块二:非铰链)
| 桶 | 个数 | 占 HSSD | 占非铰链 |
|---|---|---|---|
| 非铰链物体 | 8848 | 80.7% | 100% |
| 非铰链·需净空 | 6096 | 55.6% | 68.9% |
| 非铰链·不需净空(纯装饰) | 2753 | 25.1% | 31.1% |
| 已标注 | 6092 (99.9%) | — | 259/263 类 |
按净空型分布 (已标注物体)
| 净空型 | 物体数 |
|---|---|
| 接近 | 2687 |
| 落座 | 1295 |
| 操作 | 1195 |
| 上方站立 | 758 |
| 通行 | 155 |
| 观看 | 2 |
代表样例 (Blender 4.2.9 EEVEE_NEXT 真实渲染 · 半透明蓝=净空盒)
每张图已逐张肉眼核验净空盒方向/尺度。点击放大。
落座 Sit
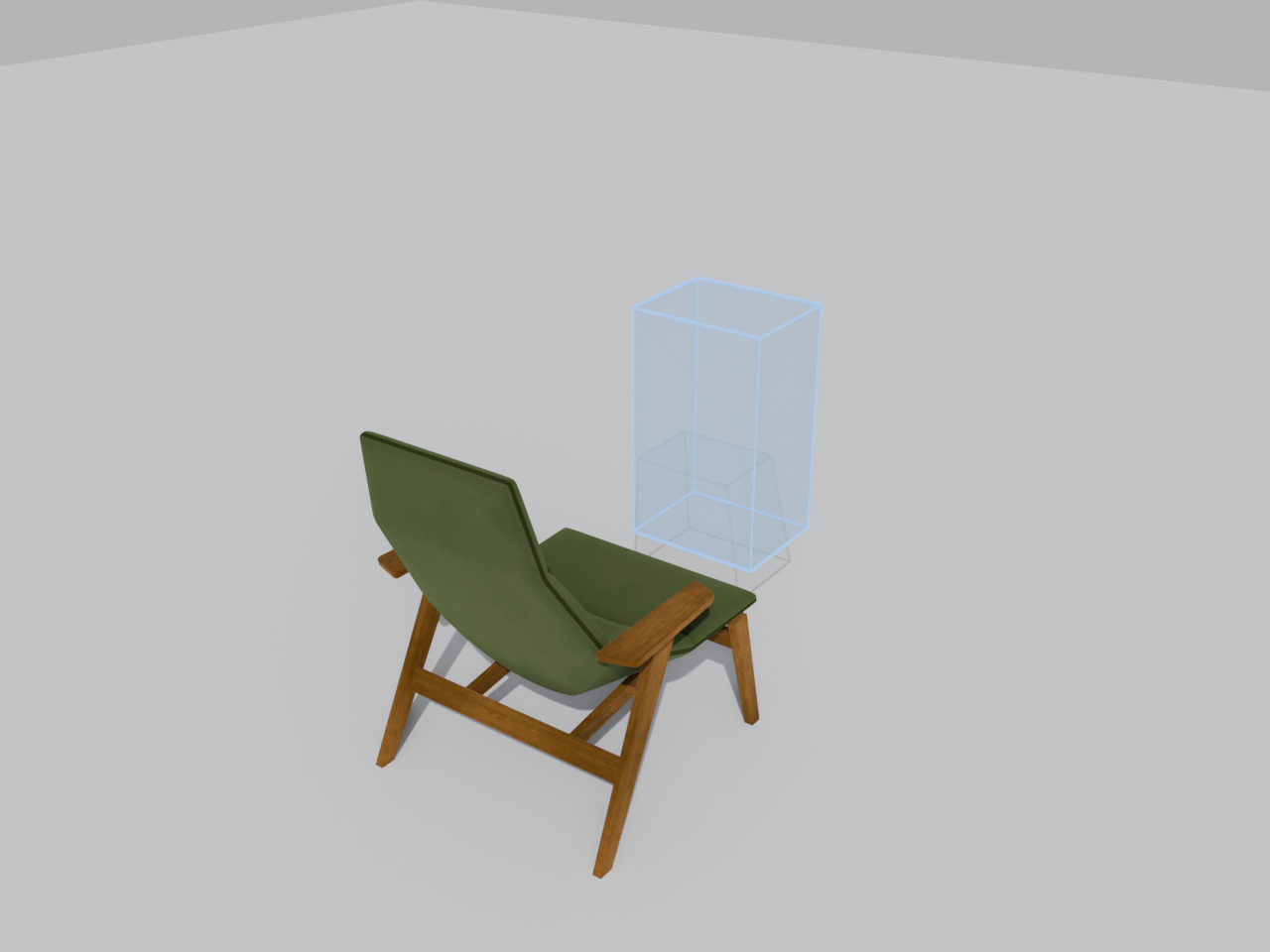
armchair · 落座/后
扶手椅·靠背检测定前
物体 W×D×H = 0.758×0.809×0.968 m · 1 个净空盒
方向来源: ⚠ 靠背启发式(方向可能偏)

sofa · 落座/后
沙发·落座纵深0.60m
物体 W×D×H = 2.124×0.9×0.766 m · 1 个净空盒
方向来源: ⚠ 靠背启发式(方向可能偏)

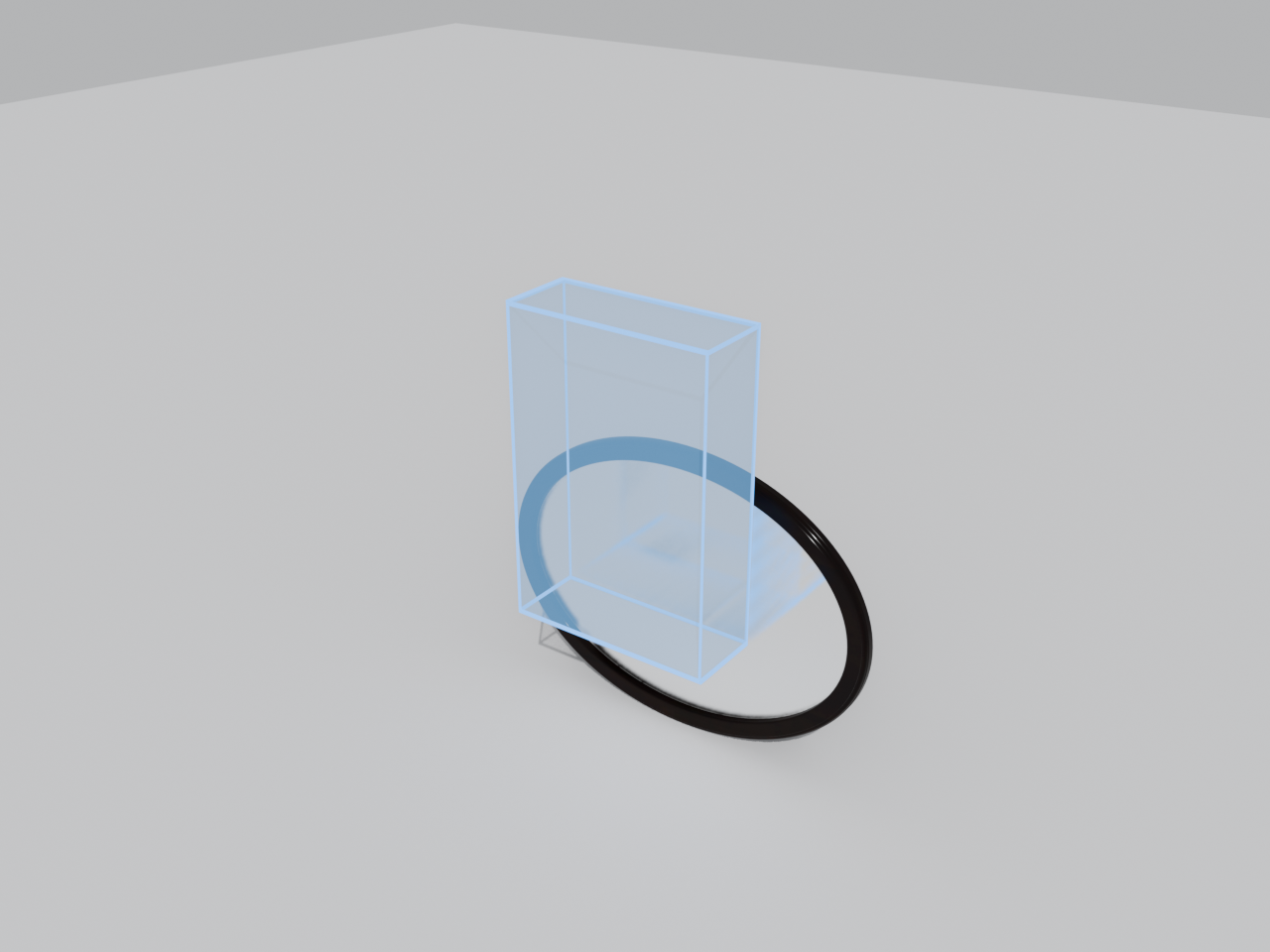
swivel_chair · 落座/四周
旋转椅·环形(方向无关)
物体 W×D×H = 0.507×0.611×0.86 m · 4 个净空盒
方向来源: ✅ 环形/方向无关
接近 Reach
wall_mirror · 接近/前
墙镜·front元数据可靠
物体 W×D×H = 1.196×0.037×0.897 m · 1 个净空盒
方向来源: ✅ front元数据(可靠)
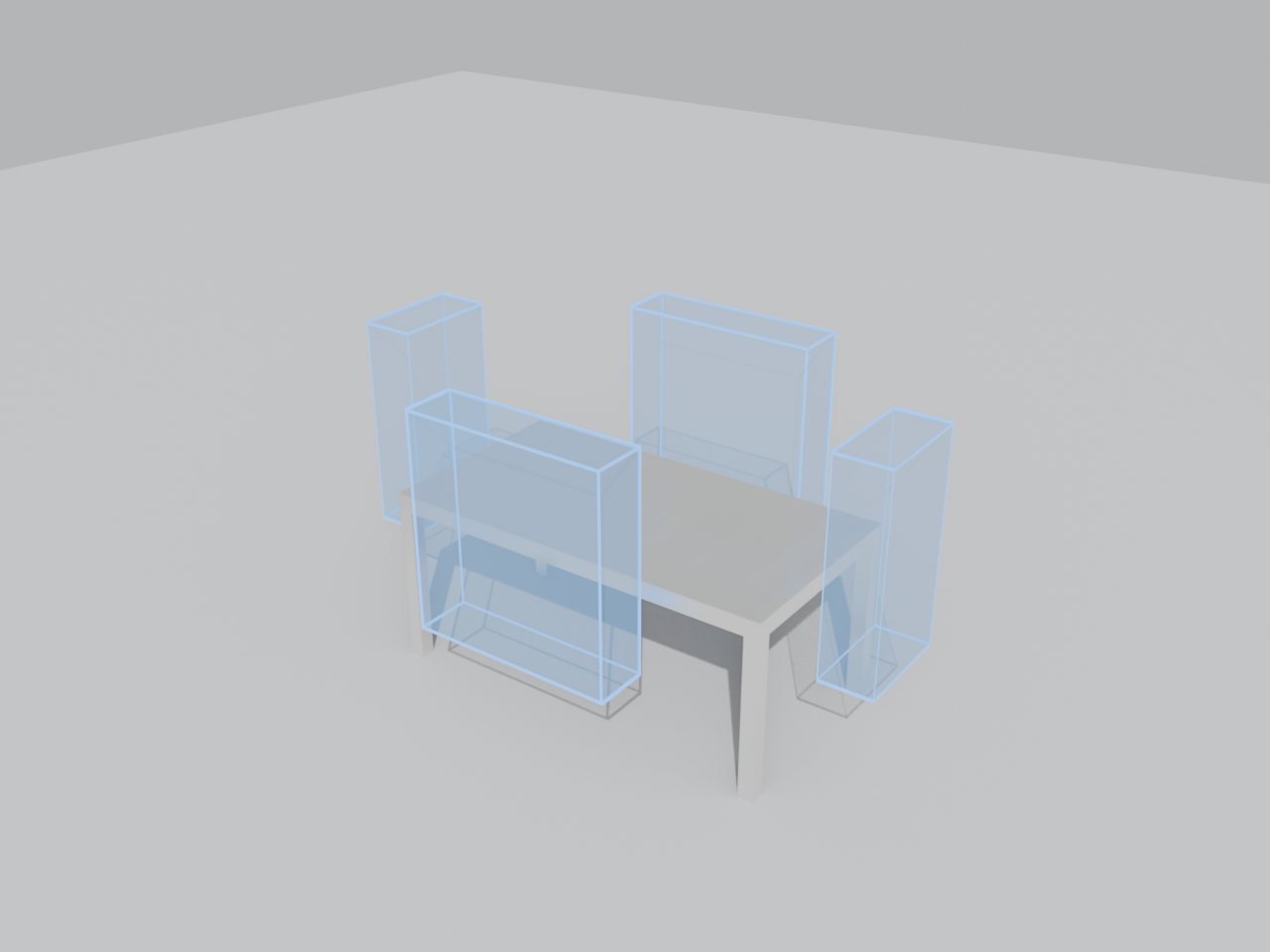
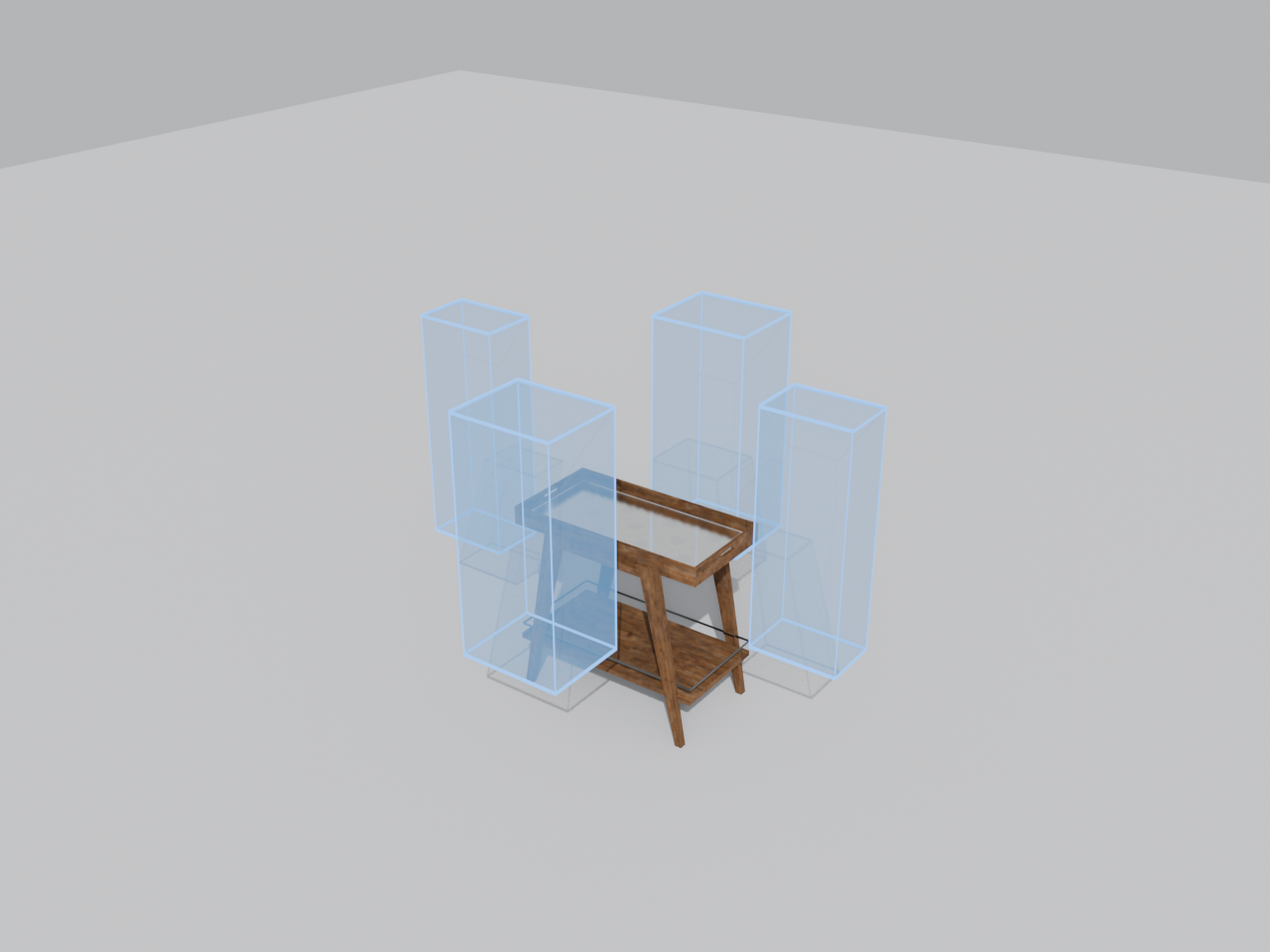
table · 接近/四周
桌·四周接近环
物体 W×D×H = 1.7×0.9×0.76 m · 4 个净空盒
方向来源: ✅ 环形/方向无关

dining_table · 接近/四周
餐桌·四周拉椅环
物体 W×D×H = 2.184×1.067×0.762 m · 4 个净空盒
方向来源: ✅ 环形/方向无关
操作 Operate
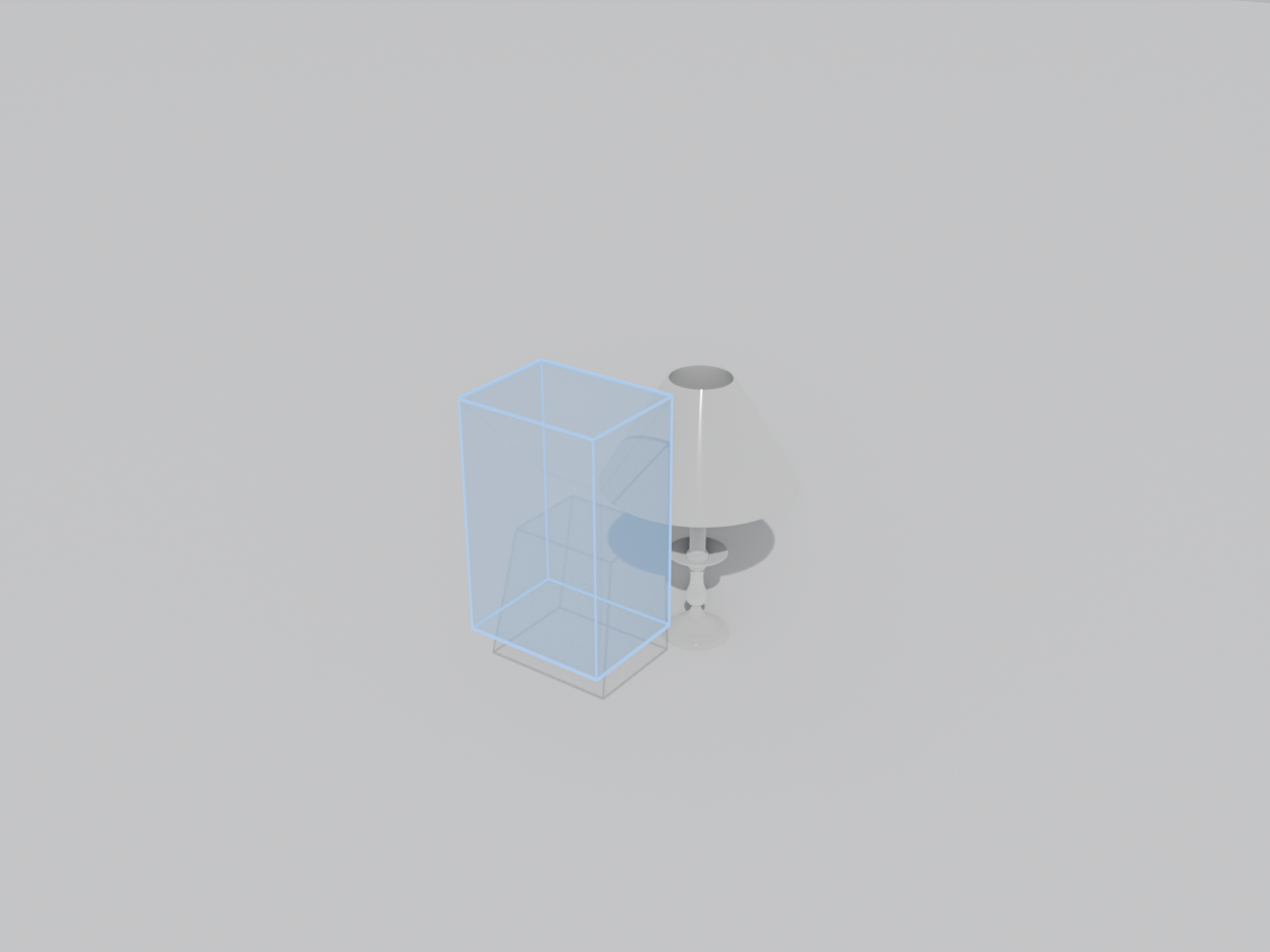
table_lamp · 操作/前
台灯·操作0.40m+顶部
物体 W×D×H = 0.366×0.366×0.532 m · 1 个净空盒
方向来源: ⚠ 对称体默认朝向
floor_lamp · 操作/前
落地灯·开关操作
物体 W×D×H = 0.236×0.274×1.121 m · 1 个净空盒
方向来源: ⚠ 对称体默认朝向

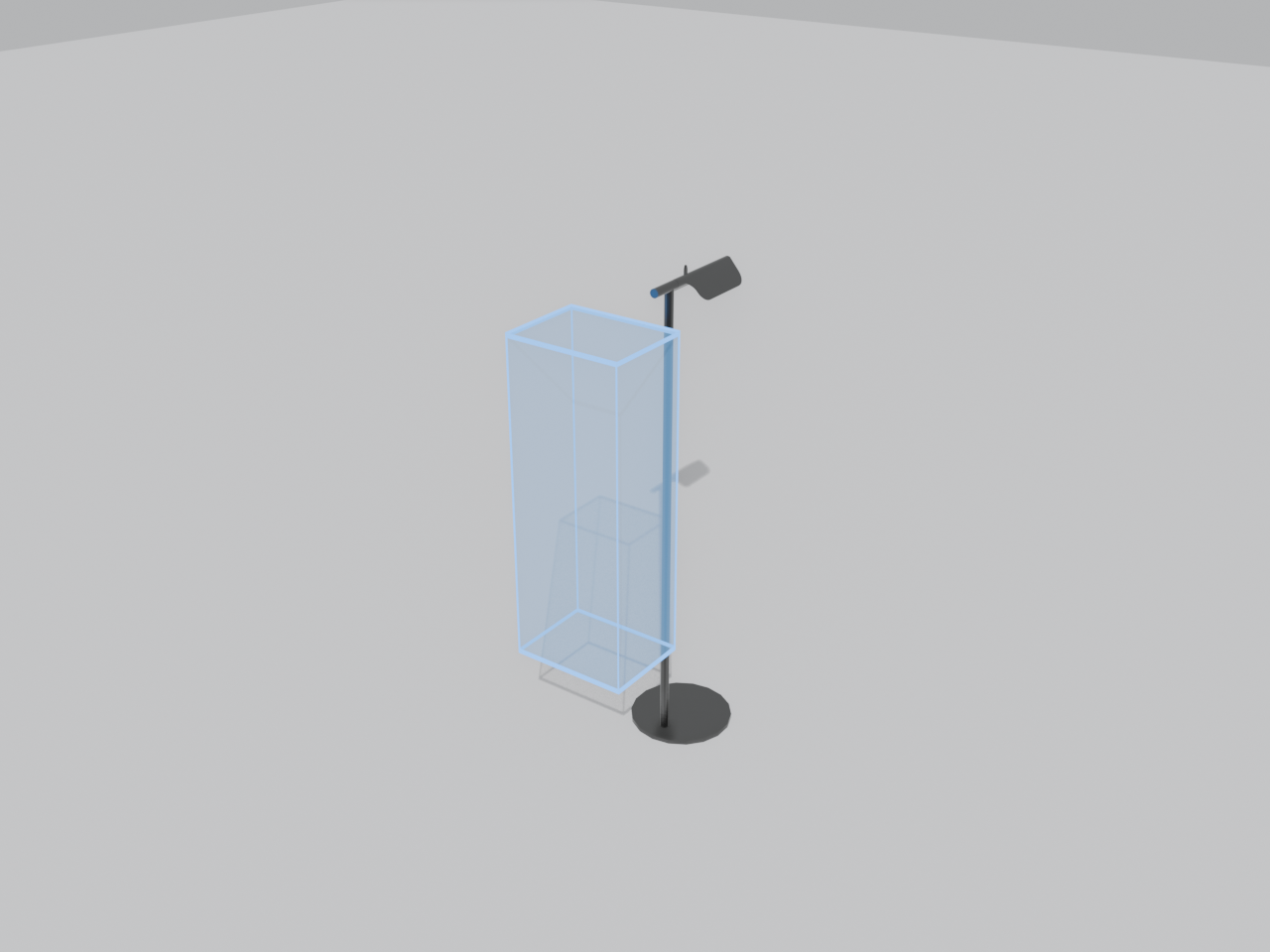
sink · 操作/前
水槽·前方站立操作
物体 W×D×H = 0.8×0.5×0.319 m · 1 个净空盒
方向来源: ✅ front元数据(可靠)
上方站立 Stand-on
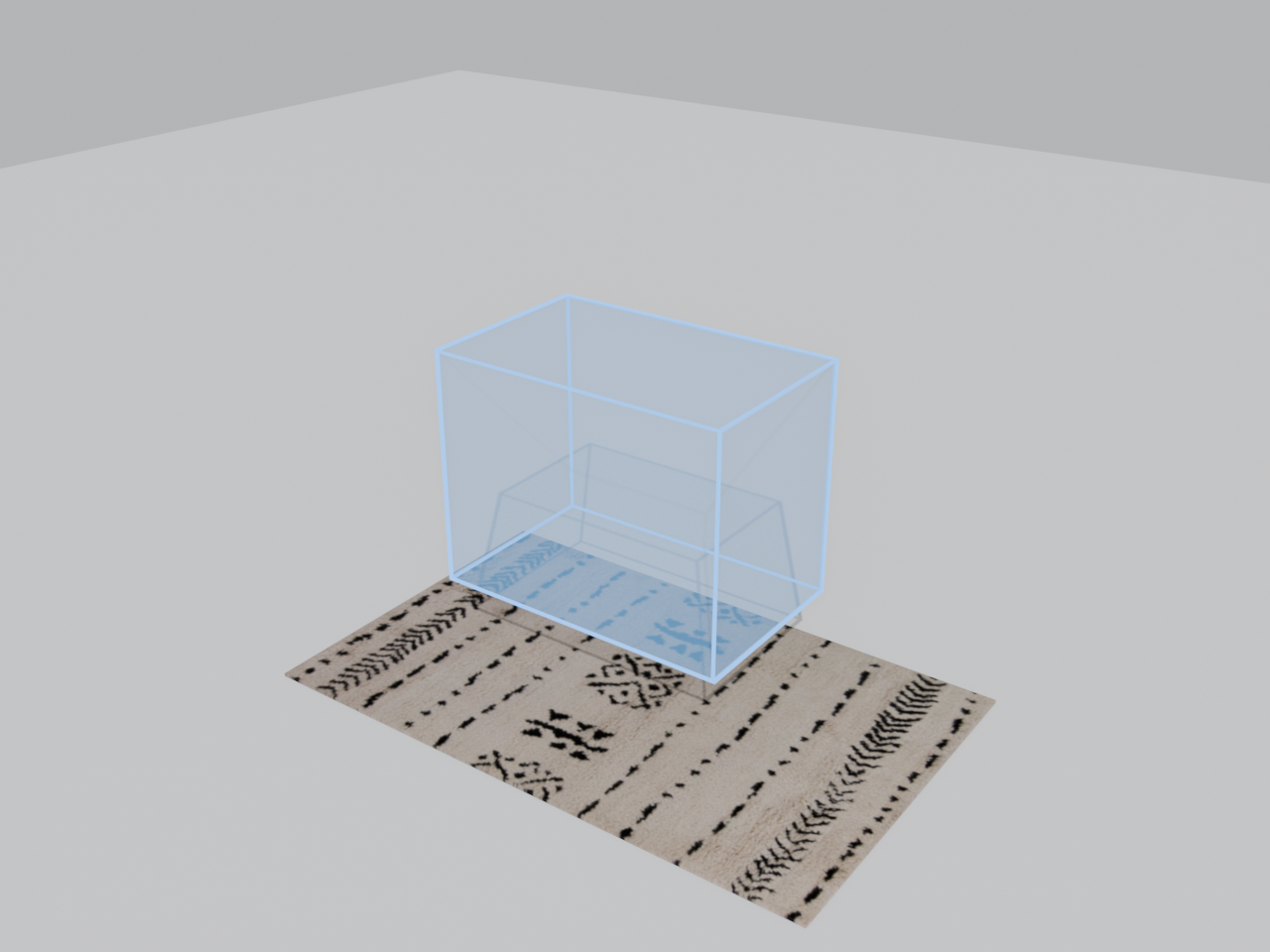
rug · 上方站立/上
地毯·上方站立1.90m
物体 W×D×H = 2.438×1.524×0.015 m · 1 个净空盒
方向来源: ✅ 环形/方向无关
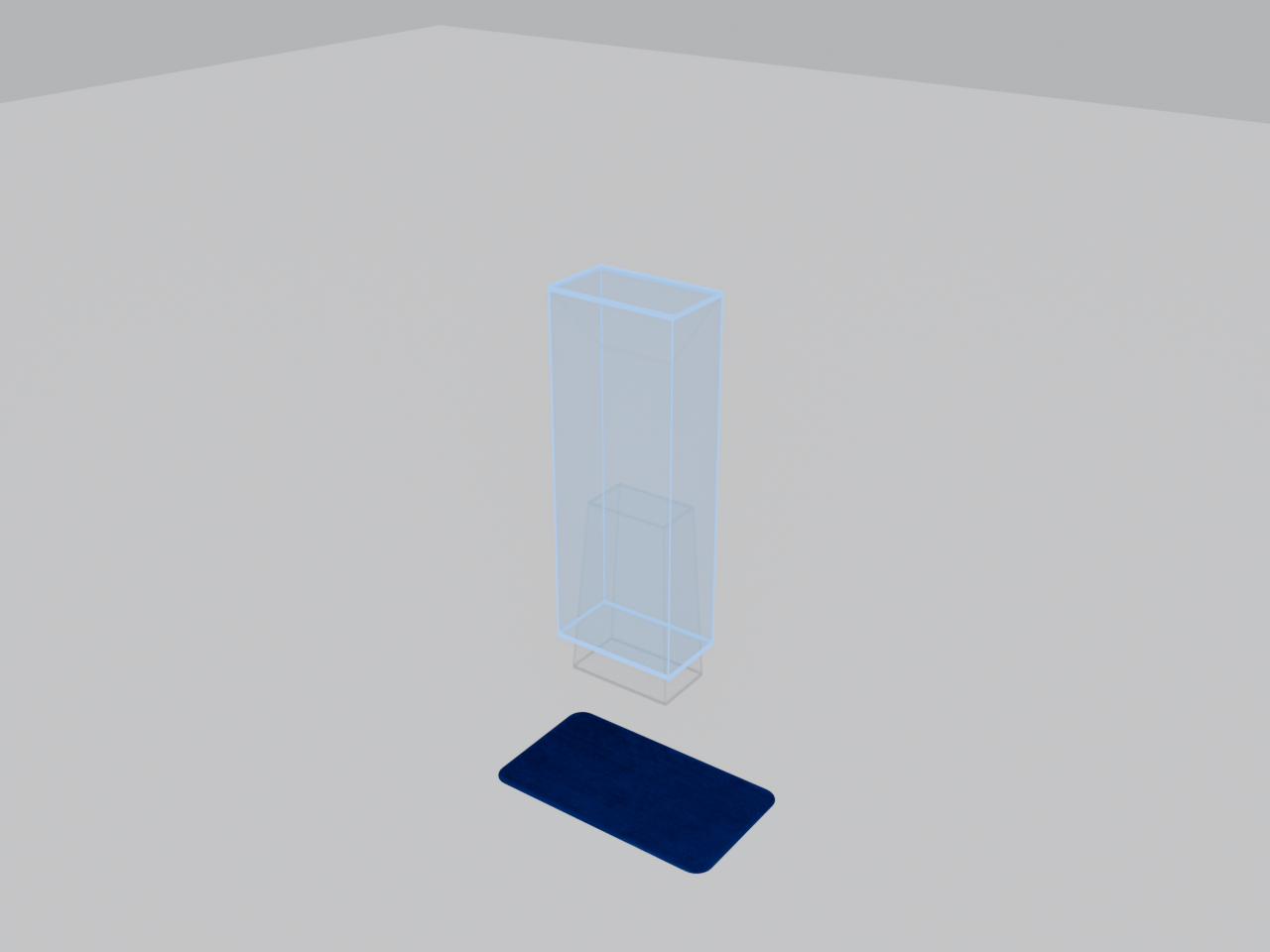
bath_mat · 上方站立/上
浴垫·踩踏垂直净空
物体 W×D×H = 0.7×0.401×0.005 m · 1 个净空盒
方向来源: ✅ 环形/方向无关
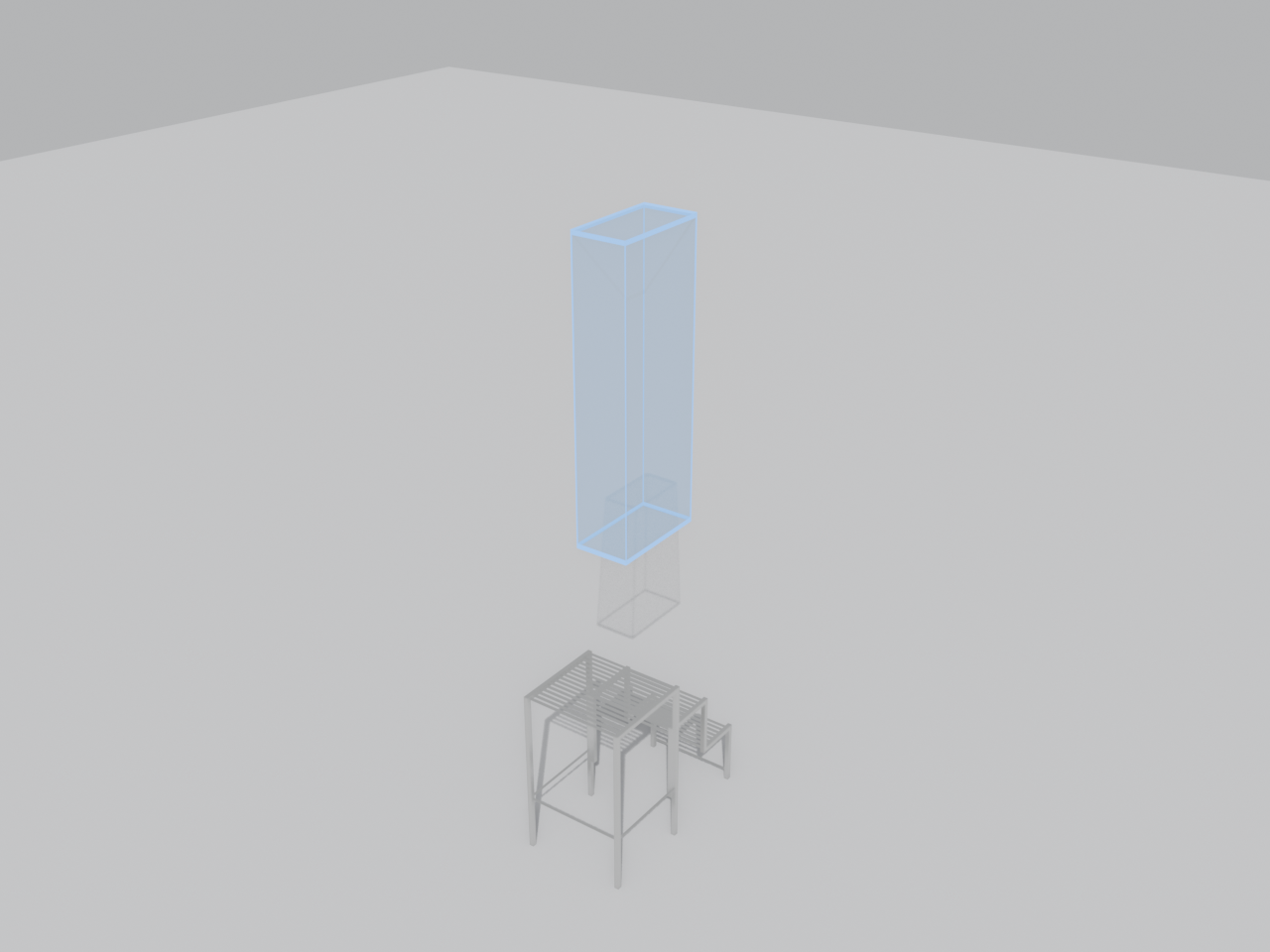
step_stool · 上方站立/上
踏凳·站立净空
物体 W×D×H = 0.353×0.666×0.572 m · 1 个净空盒
方向来源: ✅ 环形/方向无关
通行 Passage
serving_cart · 通行/四周
推车·四周通道0.70m
物体 W×D×H = 0.838×0.465×0.787 m · 4 个净空盒
方向来源: ✅ 环形/方向无关
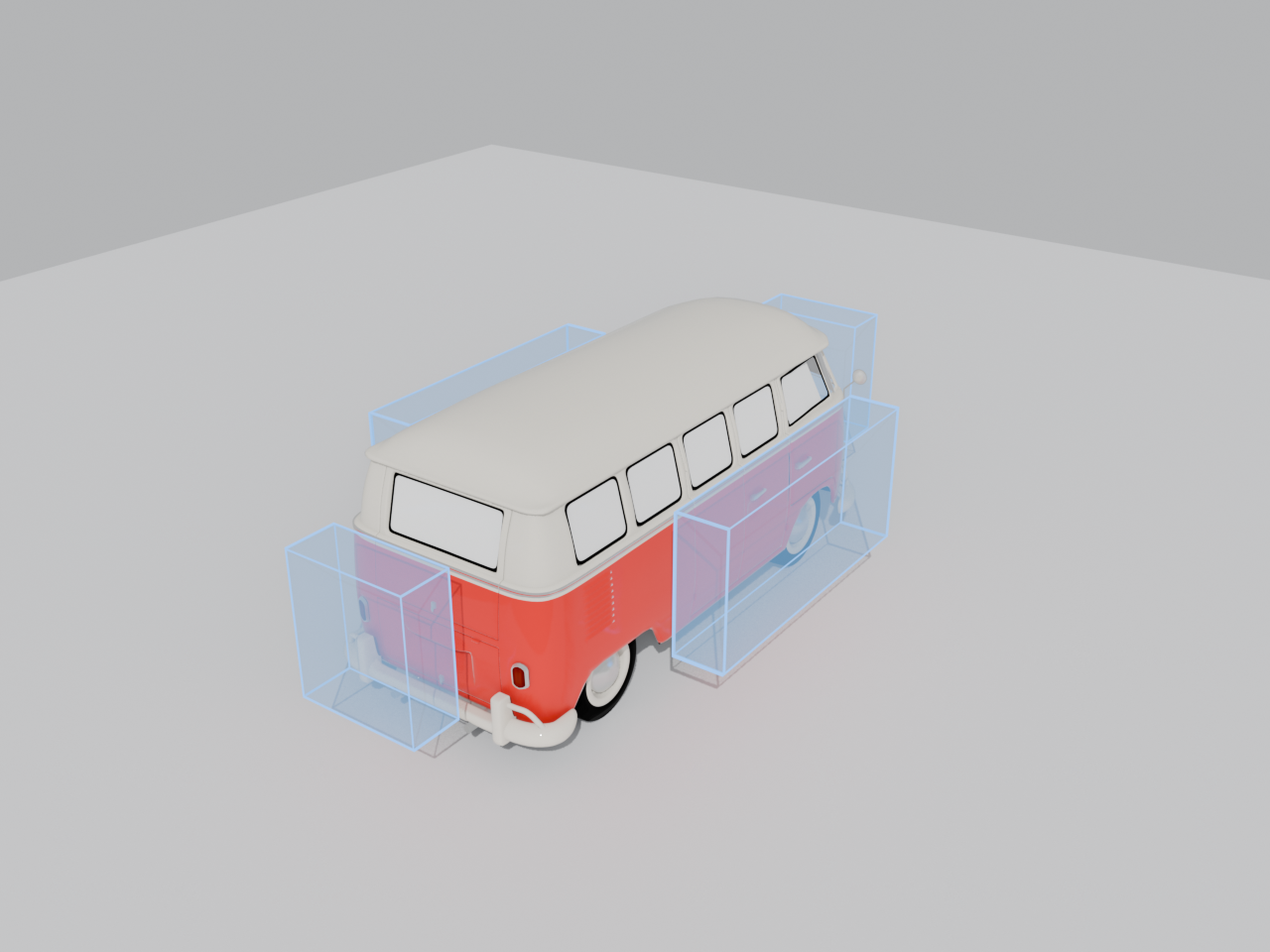
car · 通行/四周
汽车·四周通行
物体 W×D×H = 1.698×4.144×1.825 m · 4 个净空盒
方向来源: ✅ 环形/方向无关
诚实局限
1. 方向不确定性(最大局限)。 HSSD 自由家具(椅/沙发/桌/灯)在索引中无 front 元数据,
其落座/操作方向只能靠"靠背高质量侧"启发式推断,对无明显靠背的躺椅/条板沙发会判错侧(盒尺寸正确,放置侧可能偏)。
墙挂件(镜/画/屏)有 front 元数据,方向可靠;四周环形(桌/推车/旋转椅)与上方站立(地毯/垫)本身方向无关,恒正确。
样例卡片已逐个标注方向来源(✅可靠 / ⚠启发式)。
2. 常数为通用人体工学先验,未按本场景实测校准(待人因实验)。
3. 操作点(具体开关/把手位置)未建模,用物体整面外推=偏粗。
4. 多用途件取主用途(可坐可踩矮凳等),标歧义降置信。
5. 少数非常规方向(如 showerhead 的"下方对面")退化为"前方站立",已降为 med/low 置信。
2. 常数为通用人体工学先验,未按本场景实测校准(待人因实验)。
3. 操作点(具体开关/把手位置)未建模,用物体整面外推=偏粗。
4. 多用途件取主用途(可坐可踩矮凳等),标歧义降置信。
5. 少数非常规方向(如 showerhead 的"下方对面")退化为"前方站立",已降为 med/low 置信。
产物路径
| 全量标注 JSON | /data/250010098/NONARTIC_CLEARANCE_ANNOTATIONS_V2.json |
| 统计报告 | /data/250010098/NONARTIC_CLEARANCE_V2_REPORT.md |
| 方法规范 | .../NONARTIC_CLEARANCE_METHOD_SPEC.md |
| 标注脚本 | .../nonartic_annotate_v2.py |
| 渲染脚本 | .../nonartic_render_blender.py |