一句话:复现论文核心论点——给模型运动学指令(instruct: 部件文本+点提示)消歧,比无条件(原版 Particulate + Hungarian)在全部 4 个指标上一致更好,且训练越充分优势越大。生死判据通过。
B > A全指标(mIoU/轴角/≤15%)
7.38° vs 10.10°轴角误差 AE 均值(B 优 2.7°)
0.730 vs 0.700分割 mIoU 均值
12945 件全量铰接资产(论文级规模)
① 最终定量(20k 步, val 500件 / 1185关节)
| 指标 | B 有条件(instruct) | A 无条件(原版Particulate) | B 优势 |
|---|---|---|---|
| 分割 mIoU 均值 ↑ | 0.730 | 0.700 | +0.030 |
| 分割 mIoU 中位 ↑ | 0.773 | 0.741 | +0.033 |
| 关节轴角 AE 均值 ↓ | 7.38° | 10.10° | −2.7° |
| 轴角 AE ≤15% ↑ | 89.2% | 85.1% | +4.1pt |
8k 步时 gap 更小(mIoU +0.011 / AE 10.2 vs 12.8);20k 步 gap 扩大=条件化优势随训练稳健放大。两版均 warm-start 自预训练 Particulate(故 A 本就强、绝对 gap 温和但方向一致)。
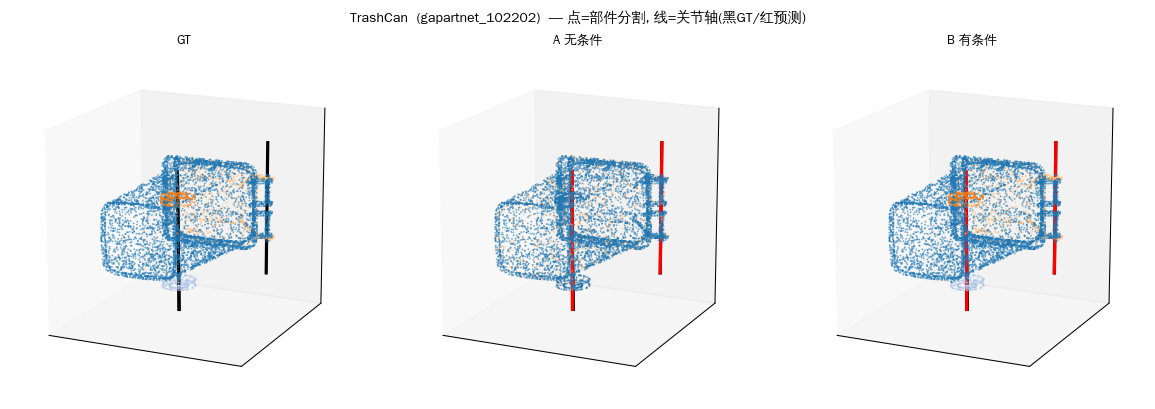
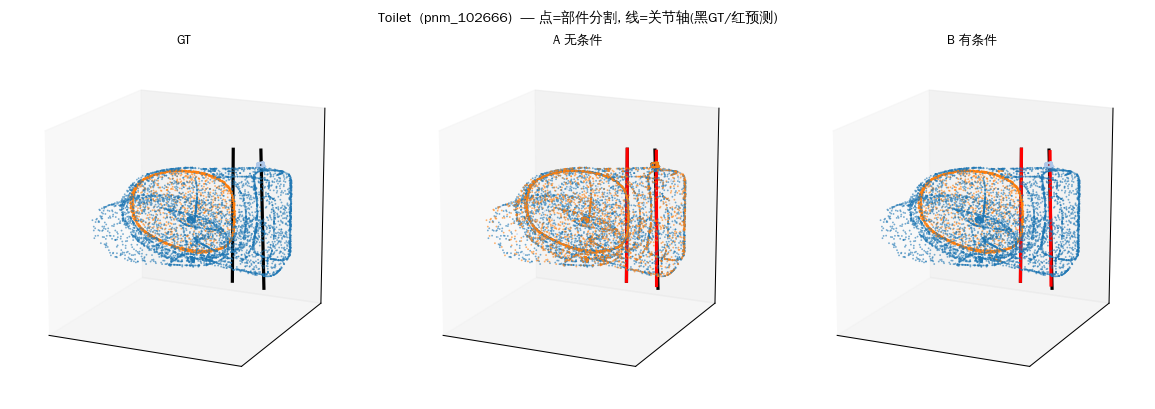
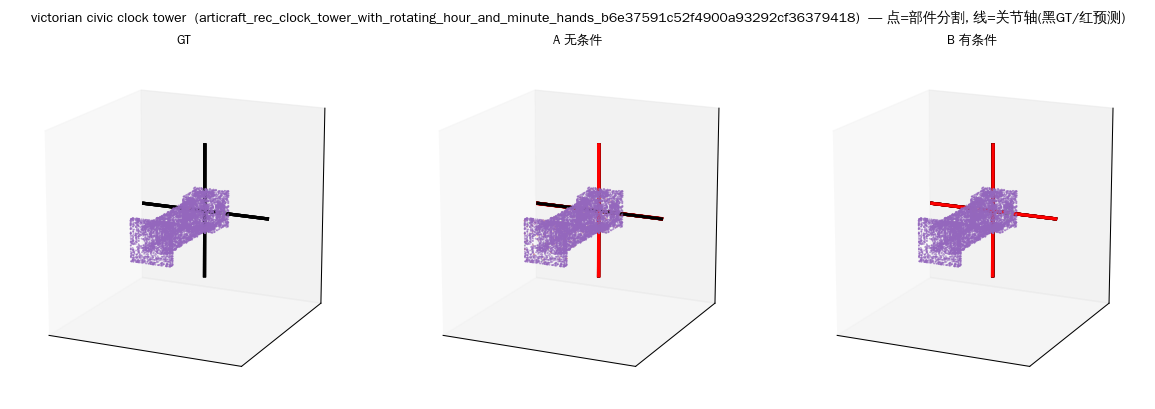
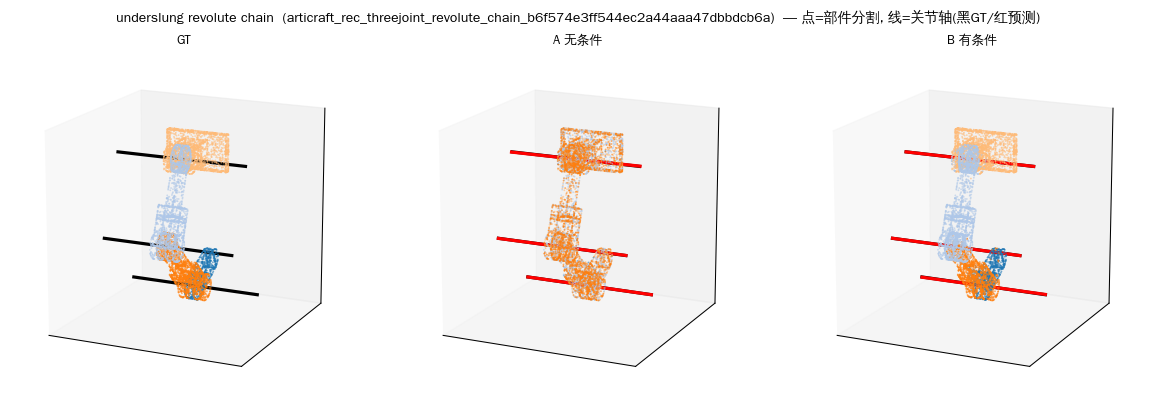
② 逐件可视化(GT / A 无条件 / B 有条件)
每件三面板:点=部件分割着色,线=关节轴(黑=GT,红=预测)。看 B 的分割与红轴比 A 更贴近 GT。最典型见 Oven:A 红轴乱飞、B 红轴竖直贴 GT。
GAPartNetOven(6部件)— 最典型
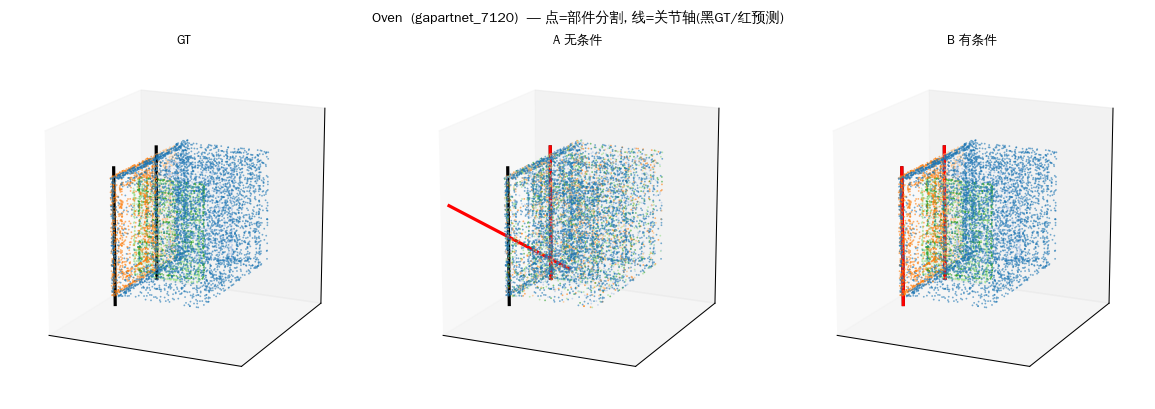
A 预测的关节轴方向全错(红线乱指);B 红轴竖直、与 GT 黑轴重合。
PNMTable(9部件)
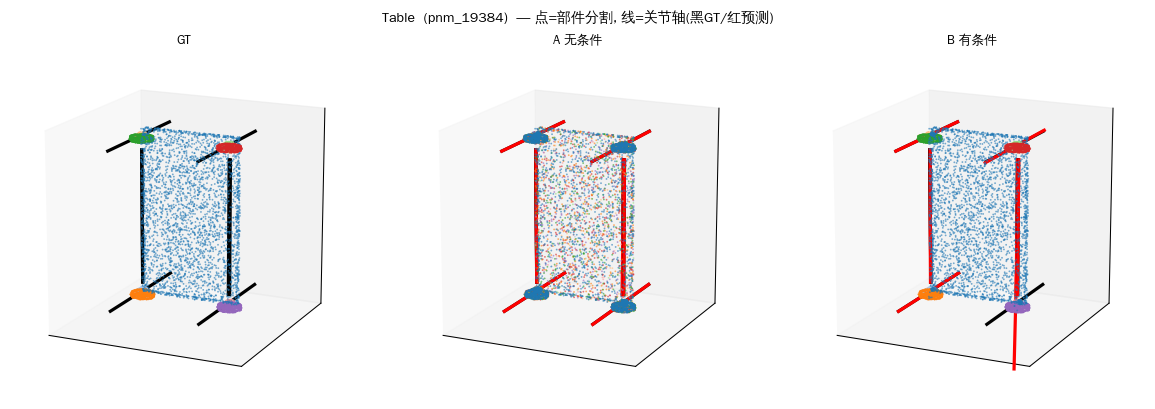
A 分割更杂乱、轴偏;B 分割更接近 GT、轴更准。
GAPartNetTrashCan
PNMToilet
ArtiCraft钟楼(9部件, 旋转时针/分针)
ArtiCraft三关节 revolute 链
③ 复现要点
• 数据:12945 件铰接资产(PNM 2161 + GAPartNet 930 + ArtiCraft 全量 9854),8卡 零渲染(PartField 点云直接抽特征)~30min。
• 方法:在现成 Particulate[32](本论文前作,权重 model.pt)上最小加条件化——CLIP 部件文本 + 点提示经 phi_t 注入 query token;B 用条件(run_matching=False, query i=part i),A 无条件(Hungarian)。两版同超参、同 warm-start。
• 判据:B 在全部 4 指标占优且 20k>8k gap → 论文"条件化消歧→更好"内核复现成立。
• 下一步:在此复现底座上叠物理层(碰撞 range / 二轴闸门 / sim-readiness)=项目真正贡献。
• 方法:在现成 Particulate[32](本论文前作,权重 model.pt)上最小加条件化——CLIP 部件文本 + 点提示经 phi_t 注入 query token;B 用条件(run_matching=False, query i=part i),A 无条件(Hungarian)。两版同超参、同 warm-start。
• 判据:B 在全部 4 指标占优且 20k>8k gap → 论文"条件化消歧→更好"内核复现成立。
• 下一步:在此复现底座上叠物理层(碰撞 range / 二轴闸门 / sim-readiness)=项目真正贡献。
EPPUR · INSTRUCT-PARTICULATE 复现 · MVR 条件化消融 · 2026-06-17 · 全部为真实模型推理(B20k/A20k, val held-out)