净空标注齐全性核查 + 扫掠体素净空示意
SceneBenchmark / 净空 · 四数据集净空标注覆盖统计 + 代表类目「可动件按关节范围扫掠的占用体」可视化 · 2026-06-17
齐全性统计
| 数据集 | 总件数 | 有净空 | bloat 中位 | bloat 范围 | 缺口 / 说明 |
|---|---|---|---|---|---|
| PM (PartNet-Mobility) | 2347 | 2330 | 1.84 | 1.0 – 10.61 | 17 件无可动件 → 无扫掠净空 (诚实缺口) |
| Articraft (LLM 合成) | 270 | 270 | 1.75 | 1.0 – 5.85 | 全覆盖 |
| HSSD 检索替换 (voxel) | 2120 | 2108 | 2.06 | 1.0 – 7.71 | 12 件 unmatched/error → 无检索源 |
| HSSD 官方铰链 (per-part) | 1480 | 1480 | — | per-part swept | 5648 个关节, 官方人工骨架 GT |
| 合计 | 6217 | 6188 | — | — | 六千余件四数据集净空标注 |
289 / 289
T2-PM 检索替身的 PM 净空源
0
有替身却缺净空 (零缺口)
99.2%
HSSD voxel 有净空 (2108/2120)
交叉核查: HSSD 检索替换结果里所有 tier=T2-PM 的 match_id(289 个去重)
全部存在于 pm_clearance_voxel.json — 没有「有替身却缺净空源」的件。
诚实缺口仅在标注本身: PM 有 17 件无可动件(扫掠=静止), HSSD 有 12 件 unmatched/error。
bloat = 扫掠占用体 / 静止占用体(同 pitch 体素口径)。
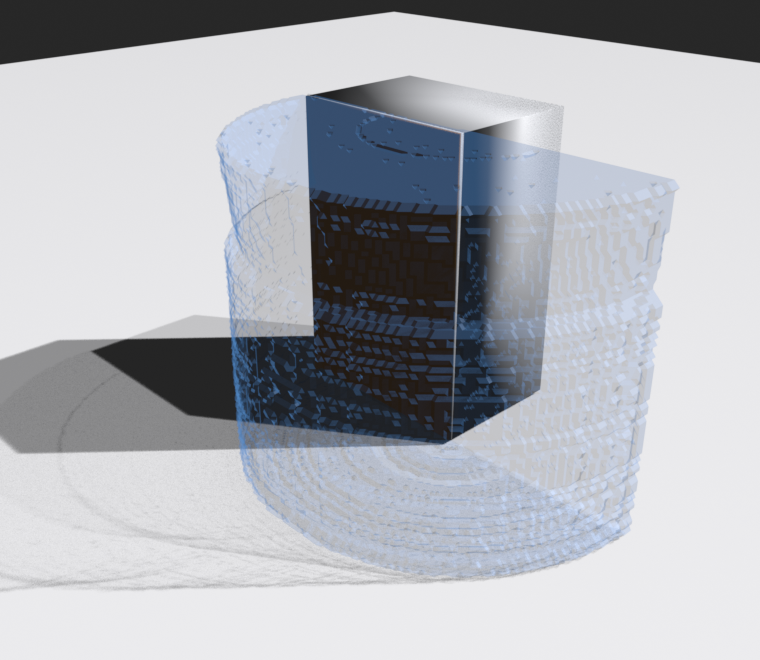
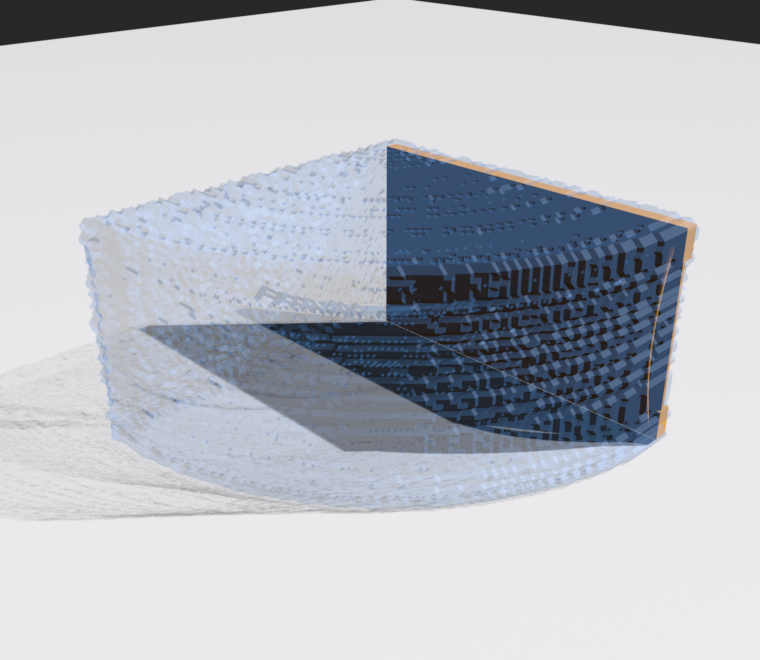
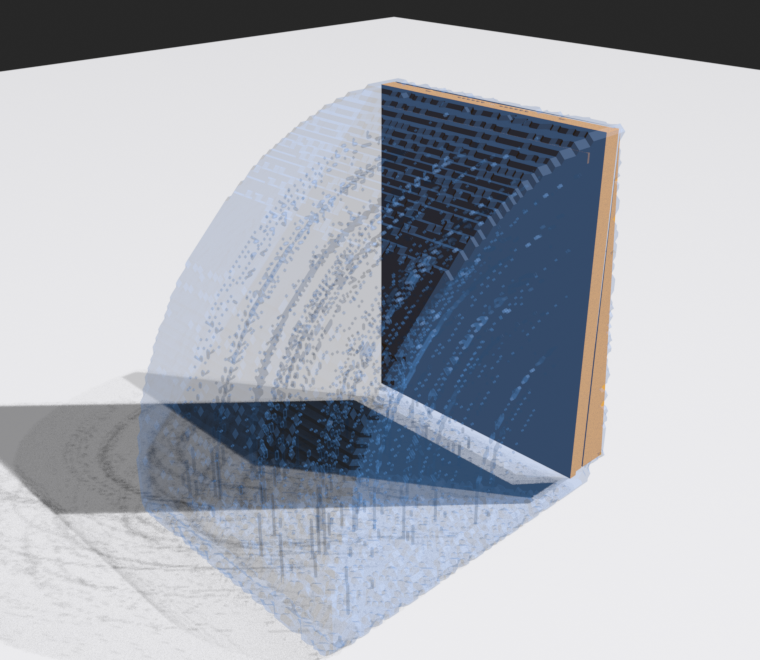
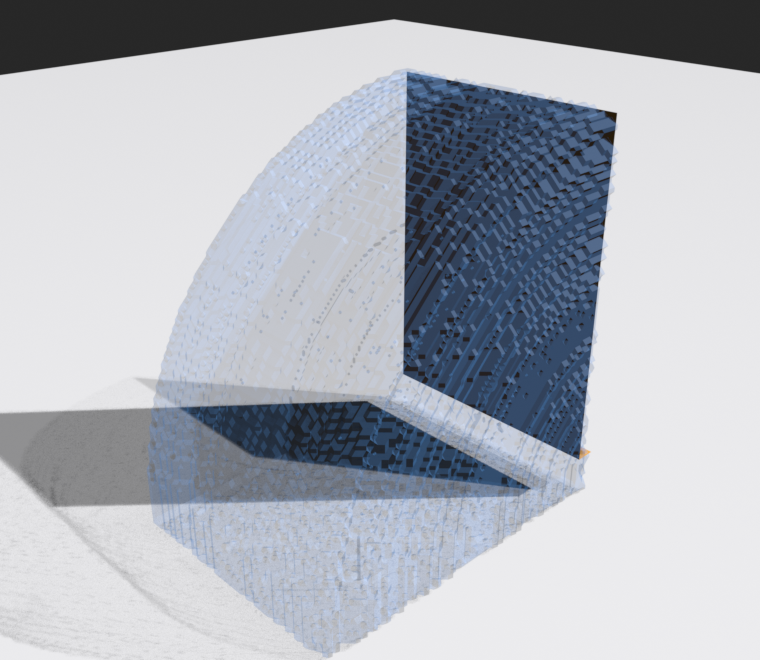
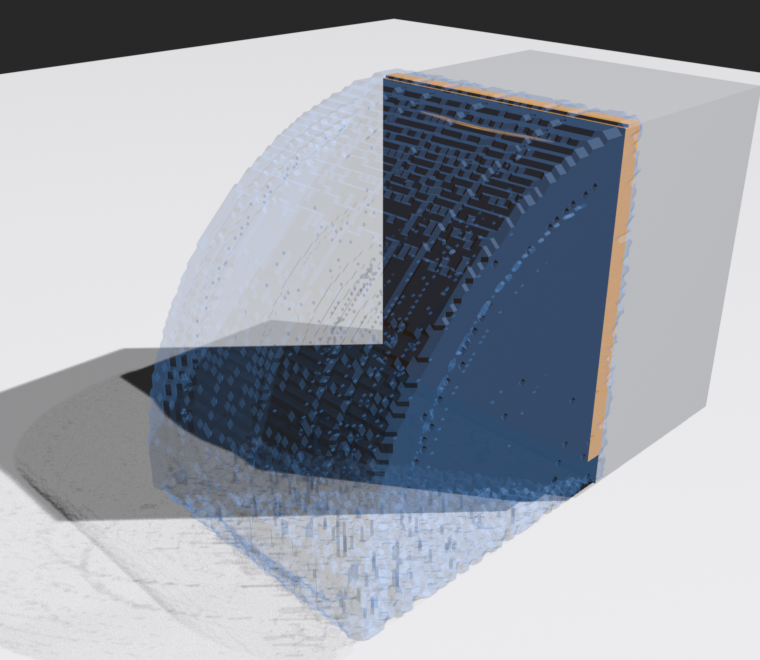
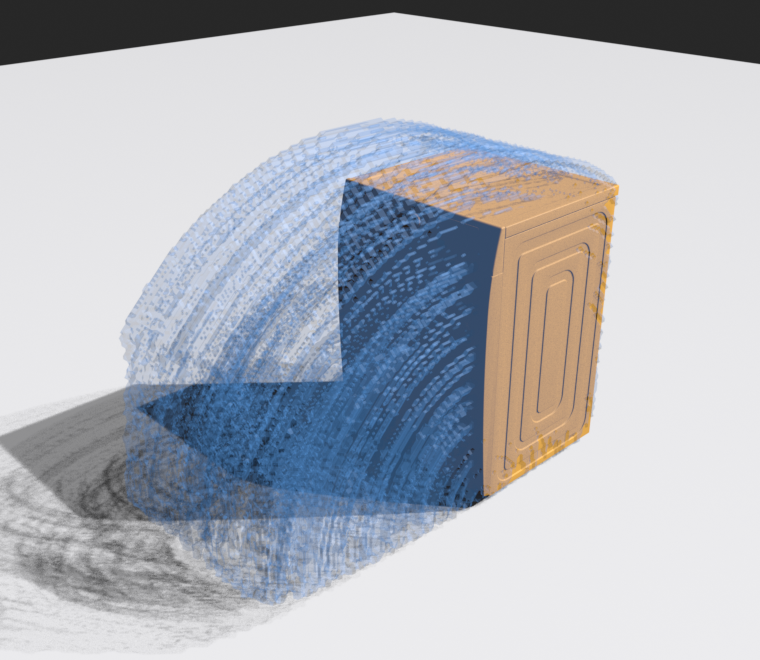
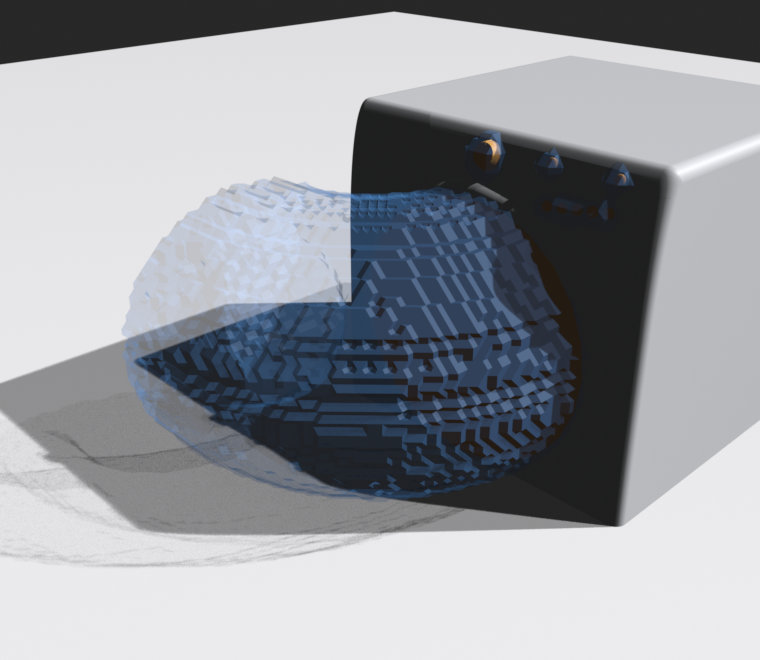
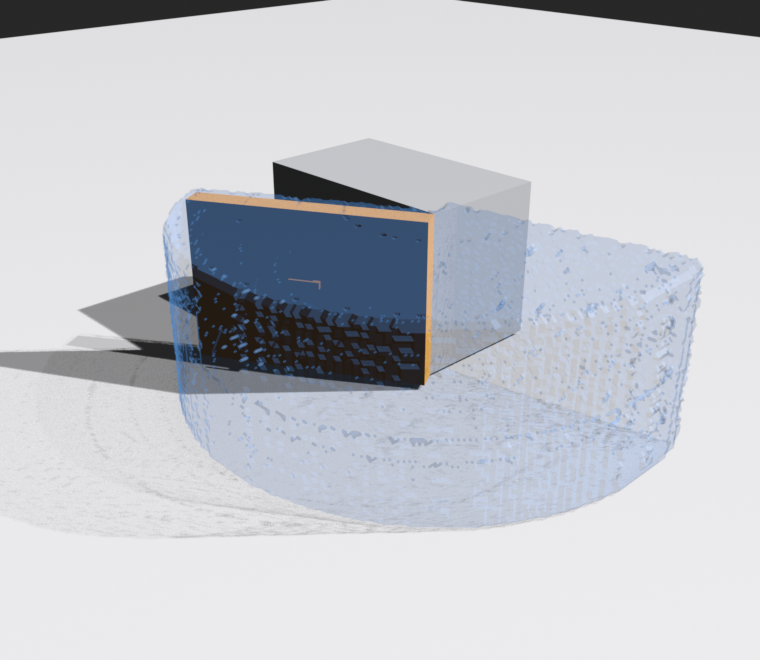
扫掠体素净空示意
橙 = 可动件 (rest 静止态)
半透明蓝 = 扫掠体素净空体 (marching cubes)
灰 = 静止机身 / 基座
可动件沿 GT 关节范围自适应采 30+ 姿态 → 表面点散布到 pitch 体素栅格 → 1-voxel 膨胀(保守包含) → marching cubes 出净空几何。 相机按扫掠体 bbox 自动拉远框住运动全貌。每张 PNG 已逐张肉眼核验扫掠体确实包住可动件运动范围、非空。 渲染: Blender 4.2.9 EEVEE_NEXT + Standard。蓝体半透明,机身较小的类(冰箱/洗衣机/储物柜)可透看到内部橙门; 门扫出大弧把机身整体罩住的类(微波炉/烤箱/保险箱)橙门被蓝弧遮挡属正常,蓝弧即净空边界。
龙头/水龙头 Faucet
旋转把手/喷头绕底座转 → 半球扫掠域
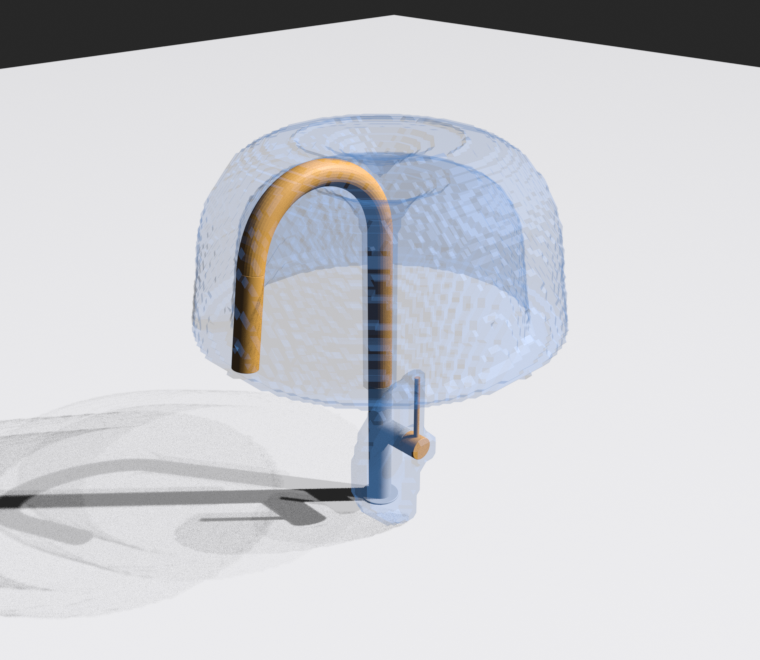
swept 0.375 m³ / static 0.080 m³
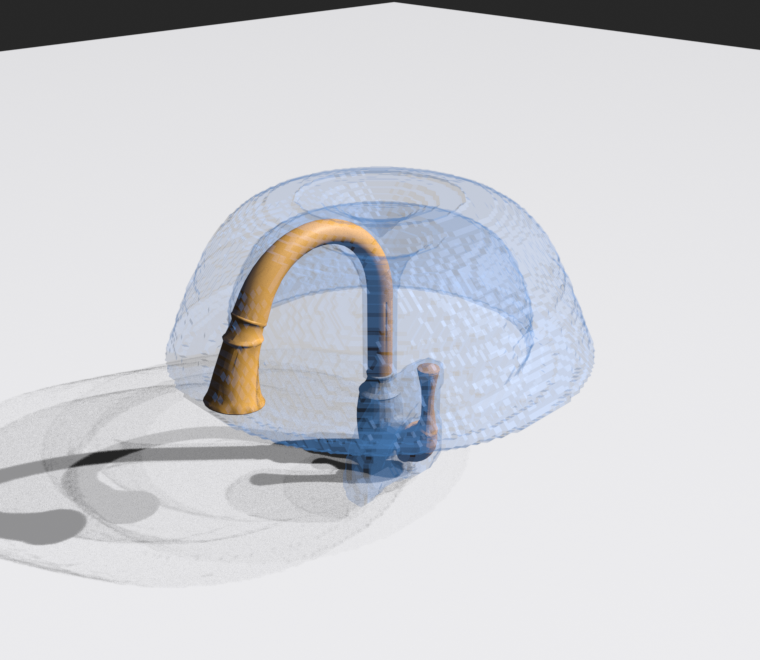
swept 0.728 m³ / static 0.153 m³
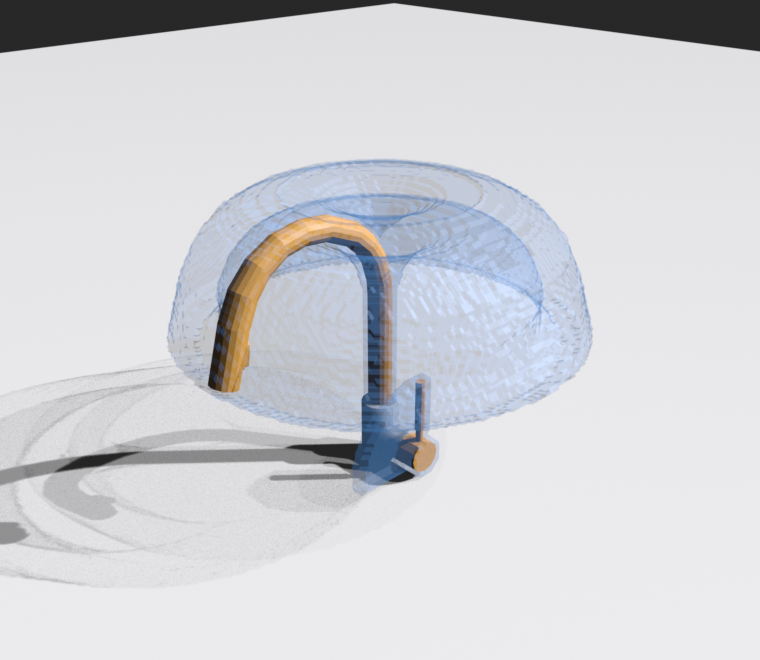
swept 0.612 m³ / static 0.135 m³
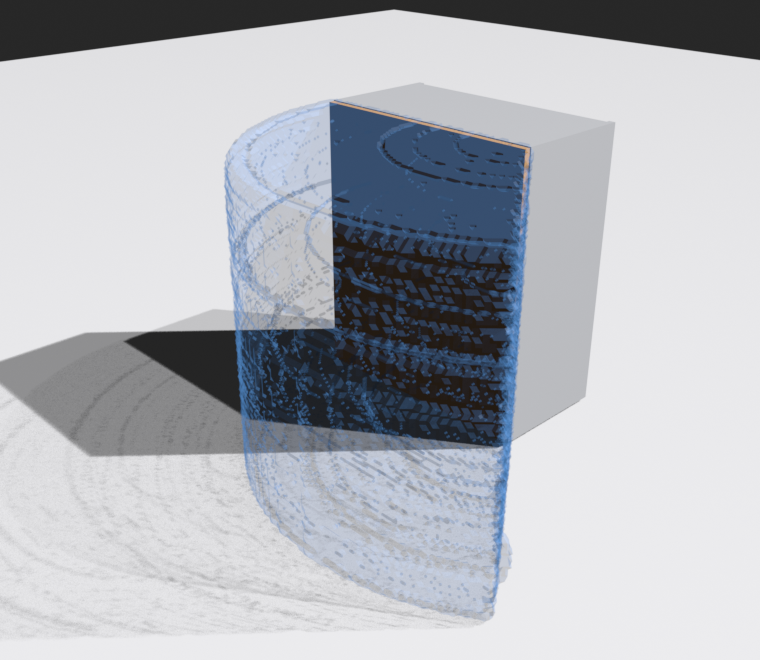
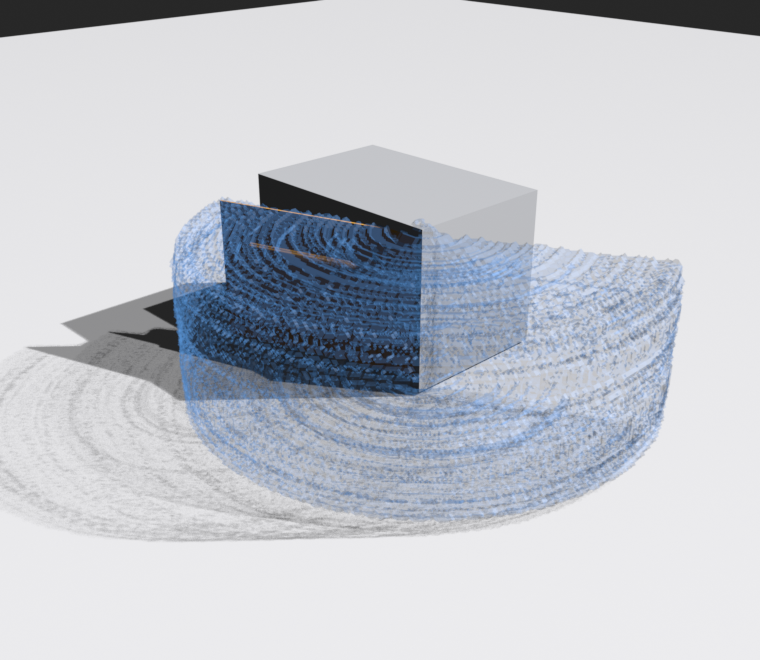
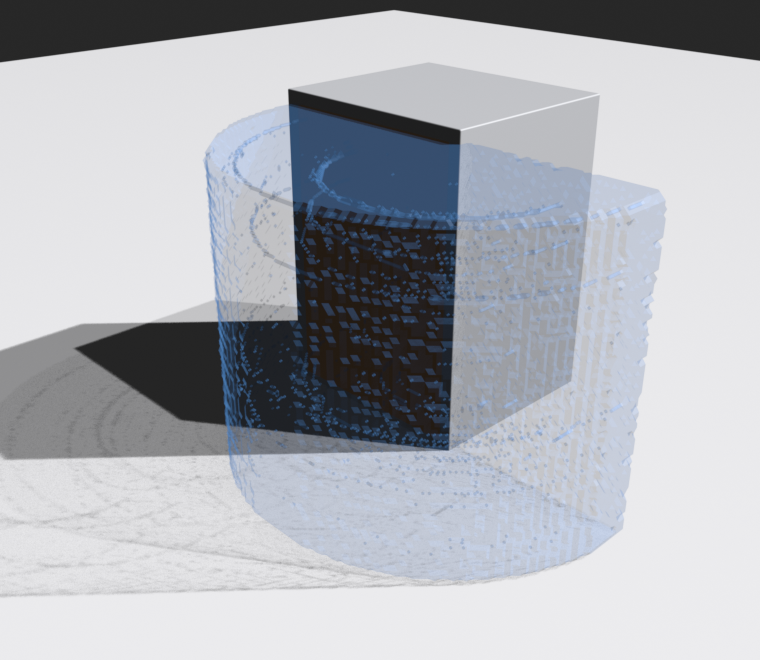
冰箱 Refrigerator
门绕竖轴旋转 → 圆柱弧扫掠
swept 1.407 m³ / static 0.319 m³
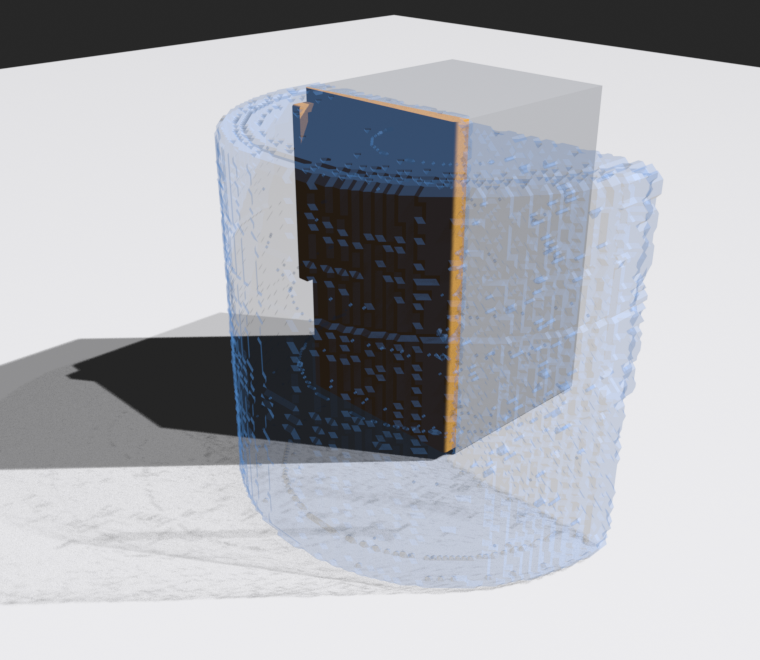
swept 1.571 m³ / static 0.344 m³
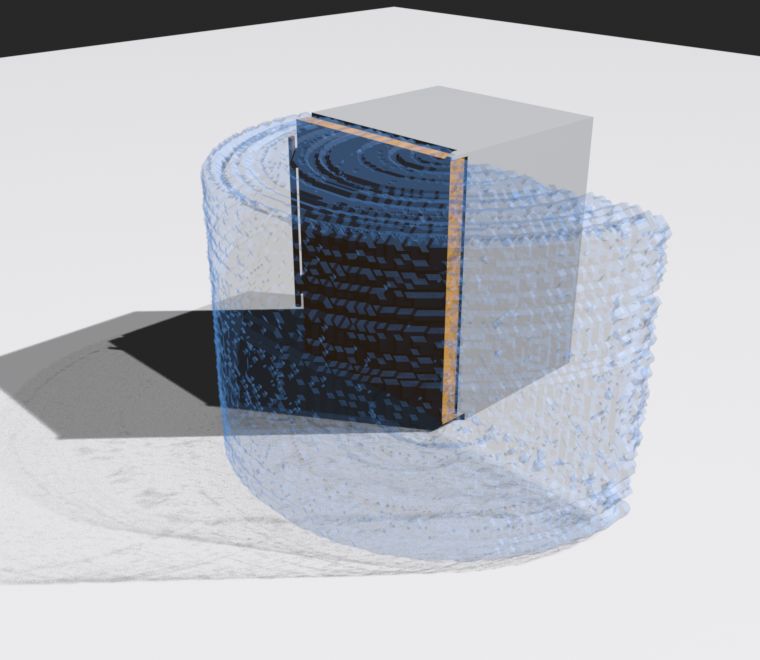
swept 1.914 m³ / static 0.406 m³
微波炉 Microwave
门侧开 90° → 前向四分之一弧
swept 0.762 m³ / static 0.074 m³
swept 0.660 m³ / static 0.080 m³
swept 0.733 m³ / static 0.073 m³
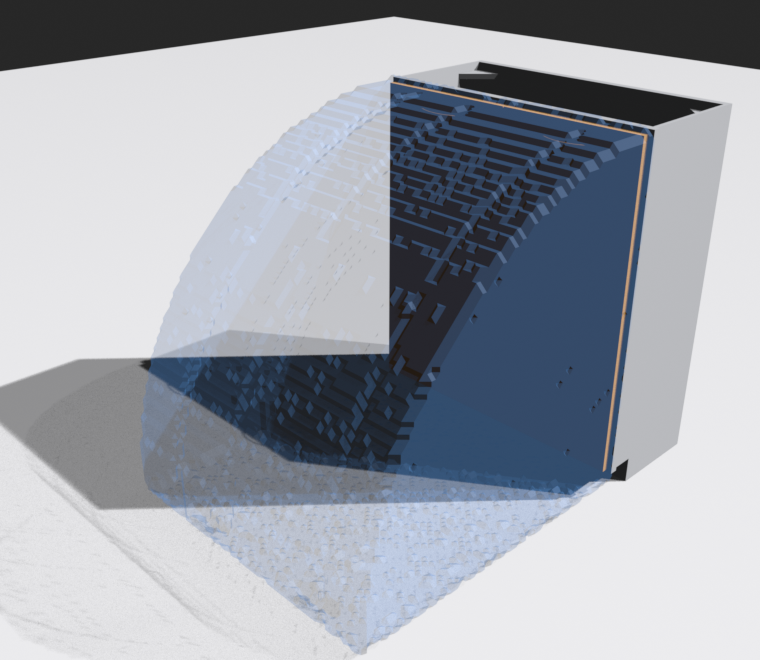
烤箱 Oven
门下翻 → 前下方四分之一弧
swept 0.966 m³ / static 0.269 m³
swept 0.503 m³ / static 0.061 m³
swept 0.468 m³ / static 0.061 m³
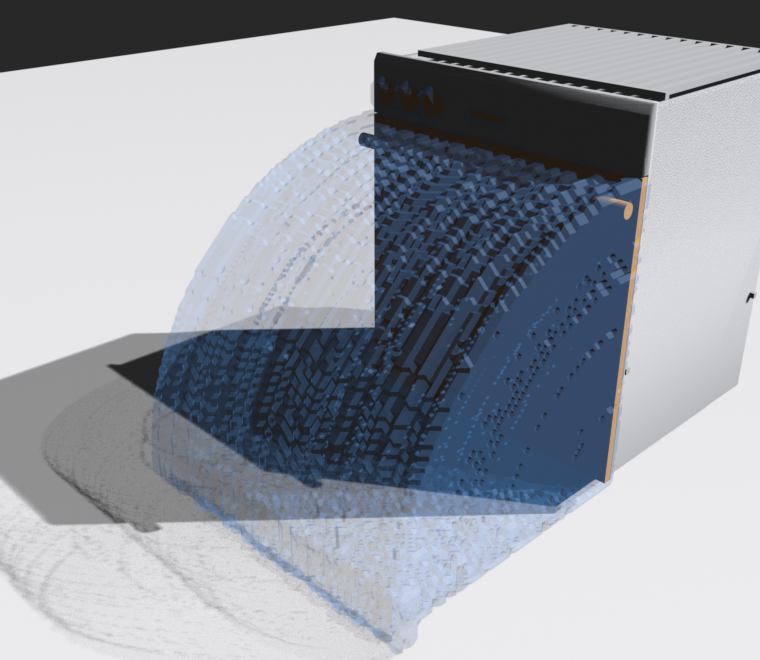
洗碗机 Dishwasher
门下翻 → 前下方扇形
swept 0.767 m³ / static 0.079 m³
swept 0.969 m³ / static 0.091 m³
swept 1.486 m³ / static 0.340 m³
洗衣机 WashingMachine
前开门绕侧轴旋转

swept 0.592 m³ / static 0.283 m³
swept 2.150 m³ / static 0.321 m³
swept 0.545 m³ / static 0.267 m³
储物柜 StorageFurniture
柜门旋转 + 抽屉平移并集
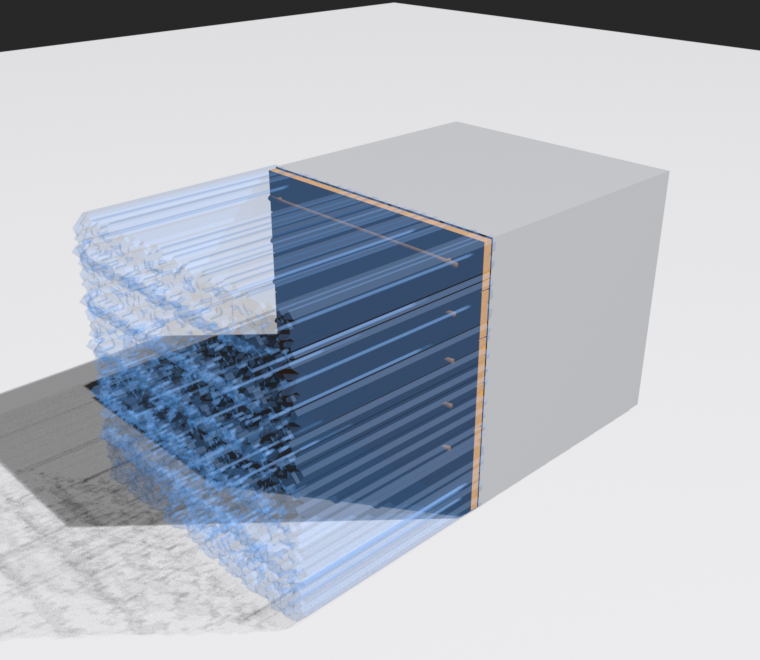
swept 2.015 m³ / static 0.575 m³
swept 1.605 m³ / static 0.340 m³
swept 1.565 m³ / static 0.330 m³
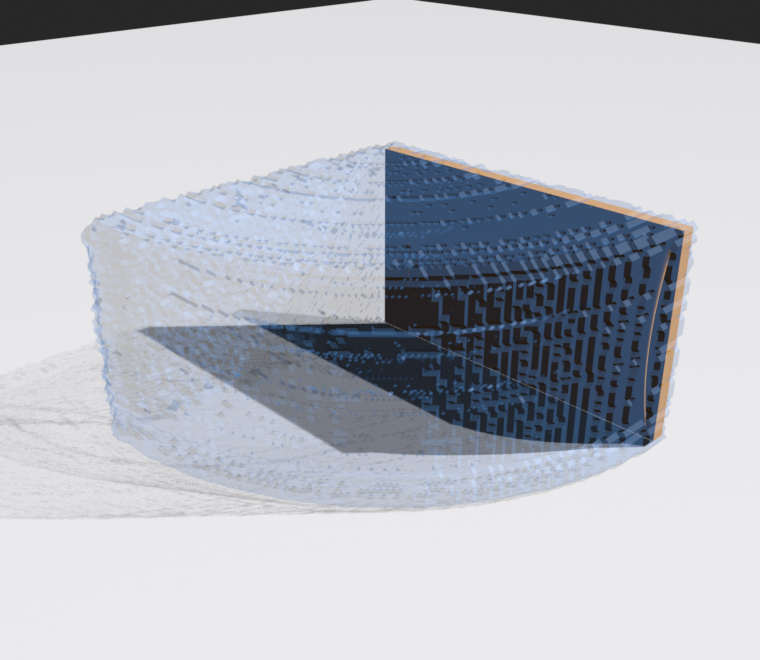
收纳盒 Box
盖子翻开 → 后上方弧
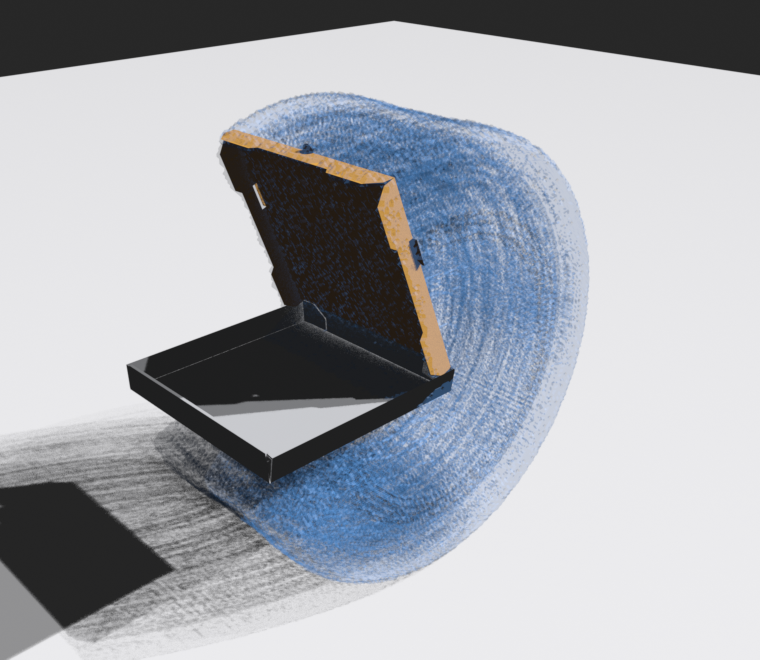
swept 0.832 m³ / static 0.140 m³
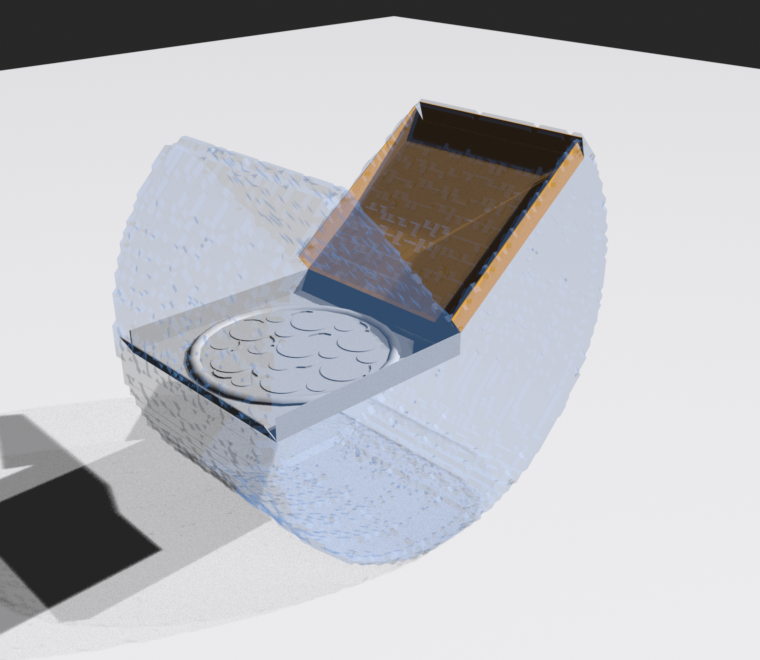
swept 0.842 m³ / static 0.158 m³
swept 1.146 m³ / static 0.226 m³
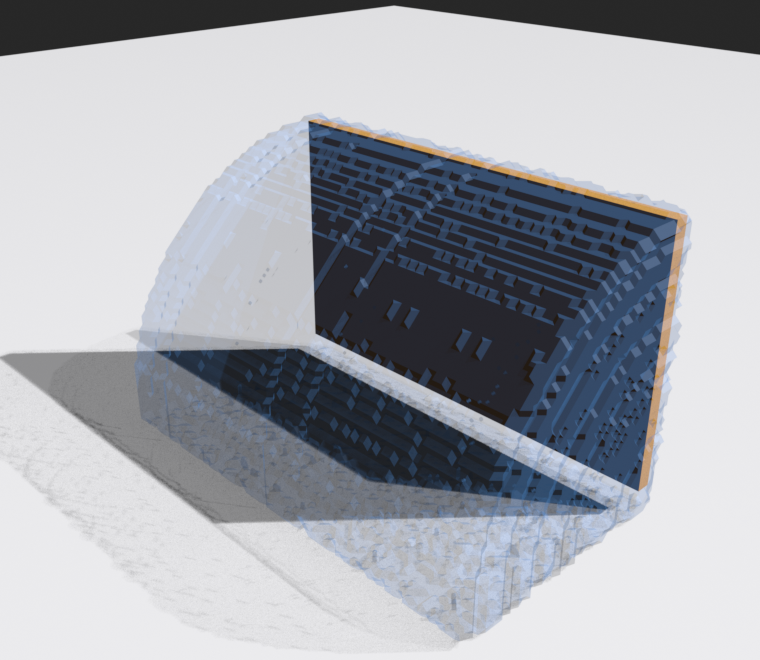
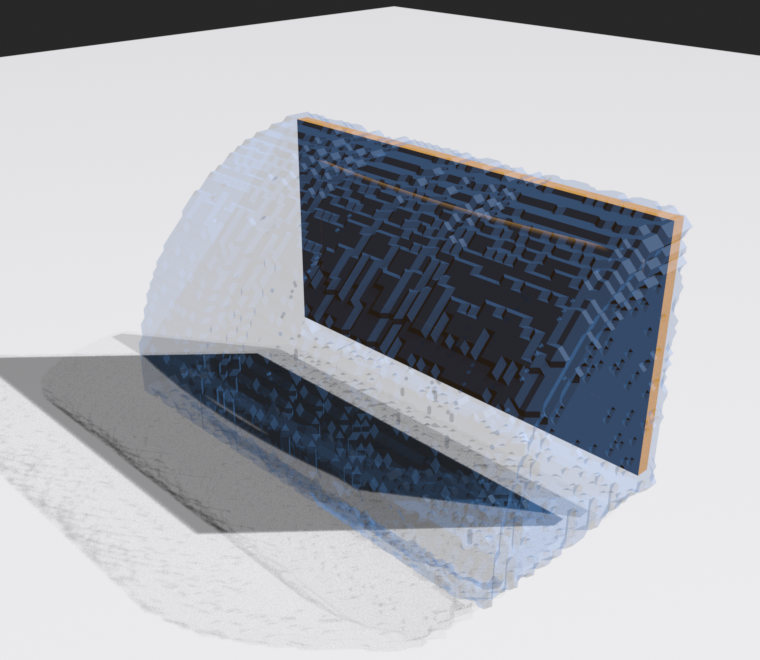
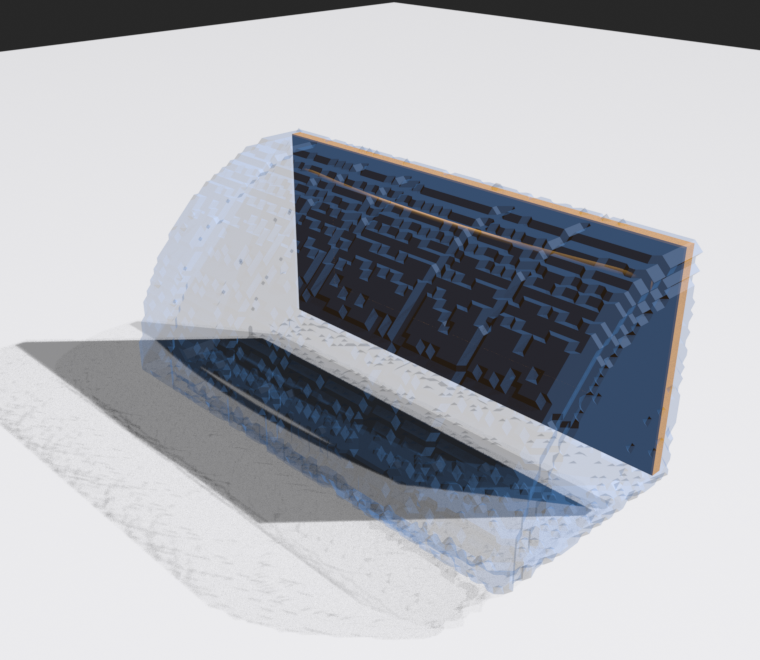
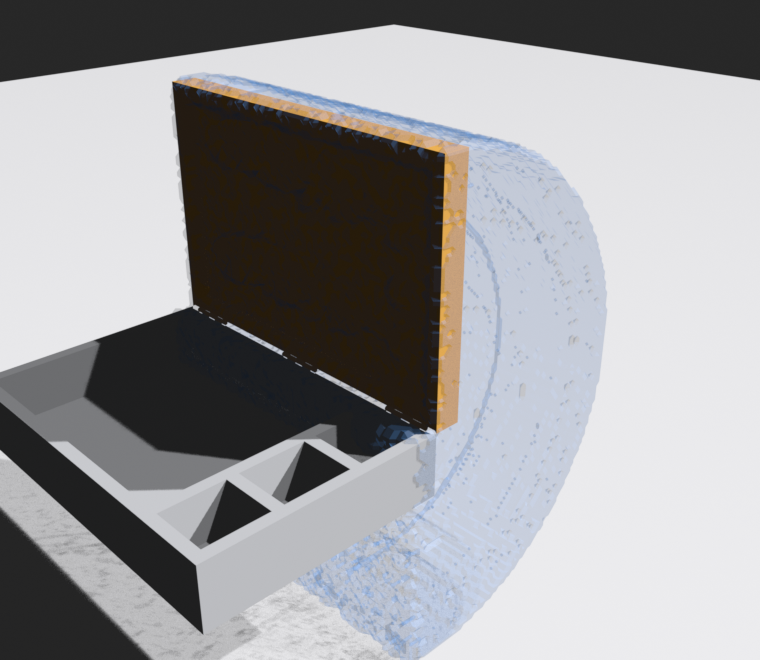
笔记本 Laptop
屏幕绕铰链后仰
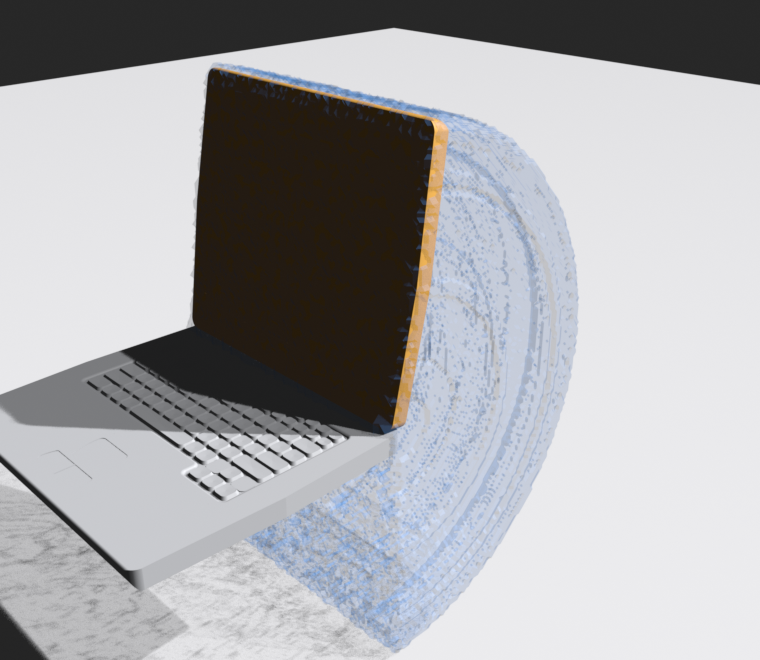
swept 0.897 m³ / static 0.158 m³
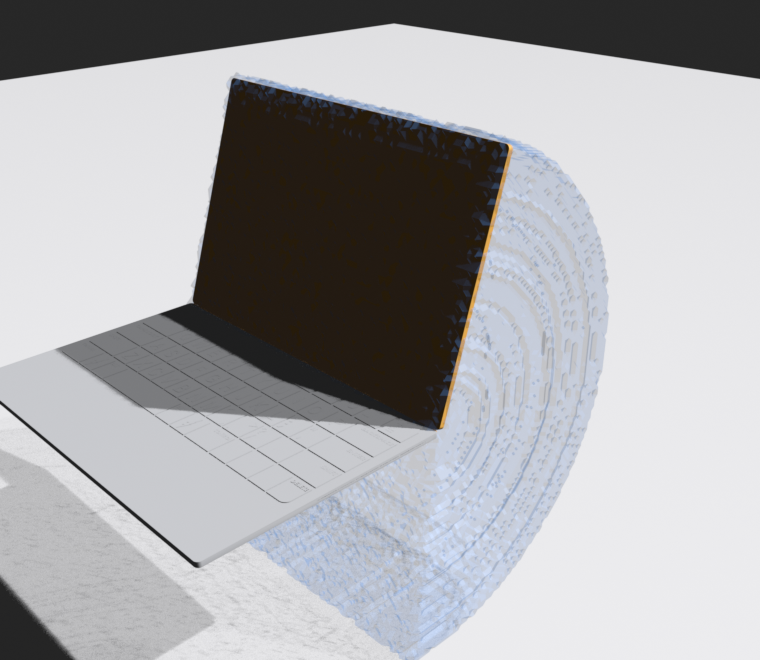
swept 0.907 m³ / static 0.165 m³
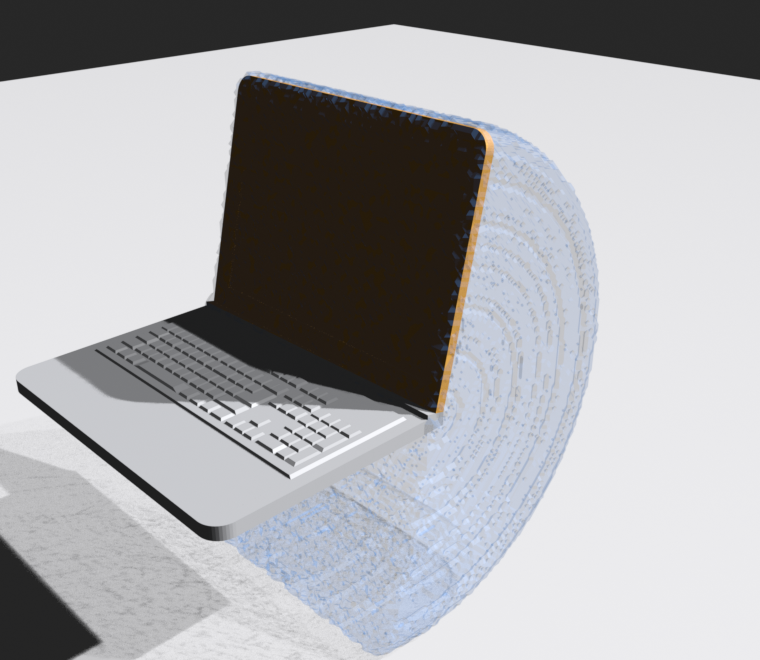
swept 0.957 m³ / static 0.170 m³
保险箱 Safe
门大角度旋转开 (~270°)
swept 1.351 m³ / static 0.296 m³
swept 1.241 m³ / static 0.298 m³
swept 1.188 m³ / static 0.289 m³
方法 / 复现
- 扫掠+体素+marching cubes:
swept_voxel.py/gen_swept_illust.py - 渲染(橙可动+蓝扫掠+灰静止):
render_swept_illust.py(复用render_clearance_body.py体系) - 部件点云+GT关节:
route1_pilot.py::load_object; PM 源.../PartNetMobility/extracted/dataset/<id>/ - 净空标注:
/data/scenesmith_unified_articulation_20260616/annotations/{pm,articraft,hssd}_clearance_voxel.json+hssd_official_clearance.json