净空标注 pipeline E1+E3 pilot
task3.2 净空(保守预留区域) · PartNet-Mobility 留一评测 n=20 (5类×4大运动件, 34关节) · 2026-06-09
· 配方: 分割 → AA式 VLM 程序关节预测(Articulate-Anything ICLR25 机制, gpt-5.5) → 类别先验 limit → {4铰边×2转向}扫掠并集
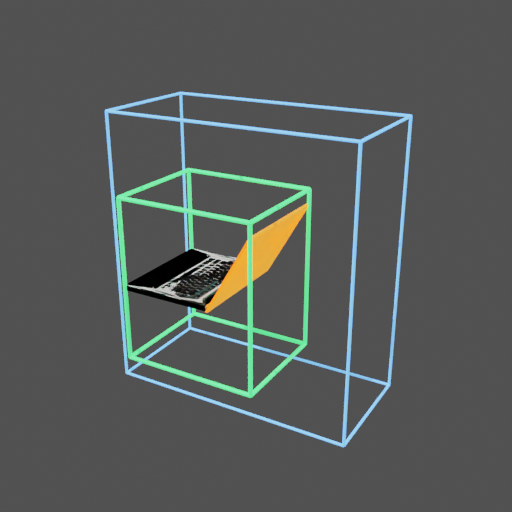
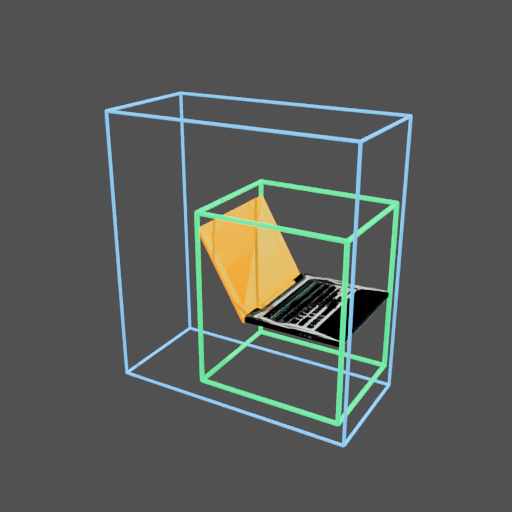
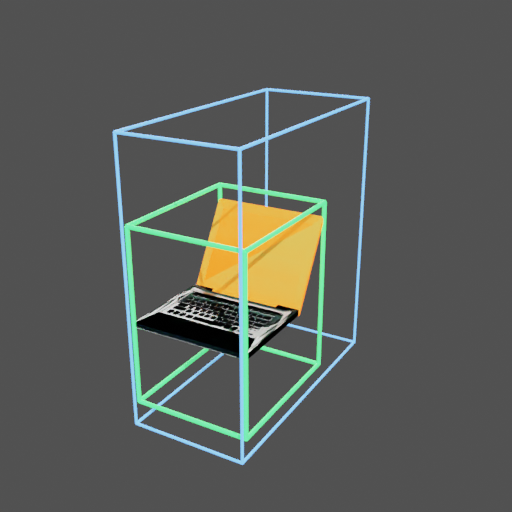
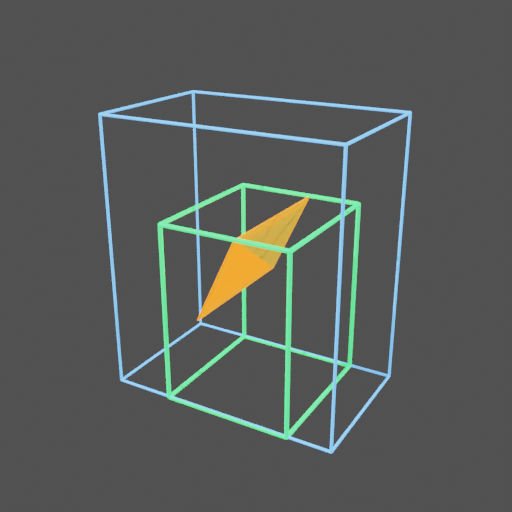
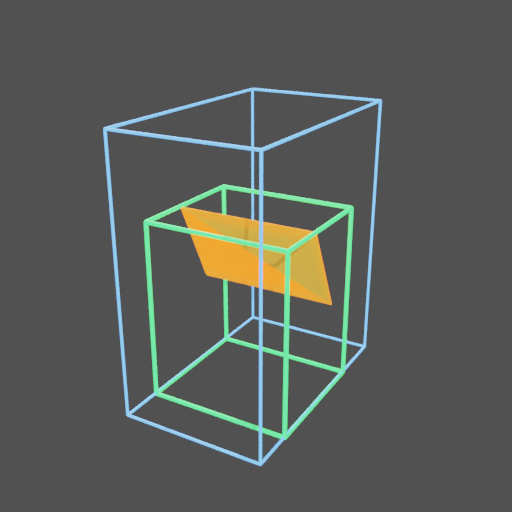
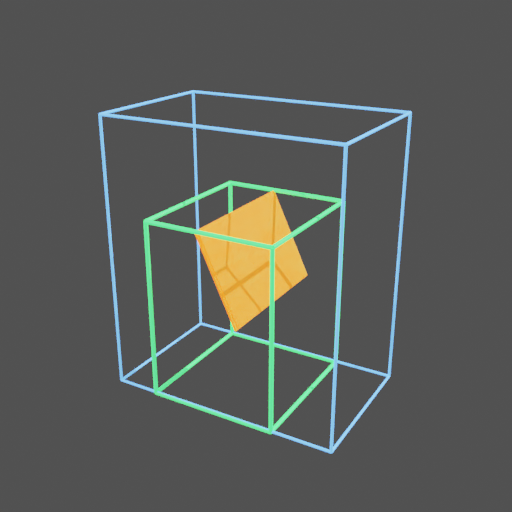
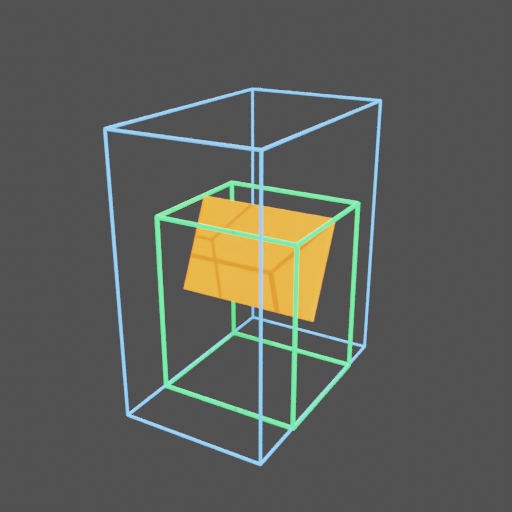
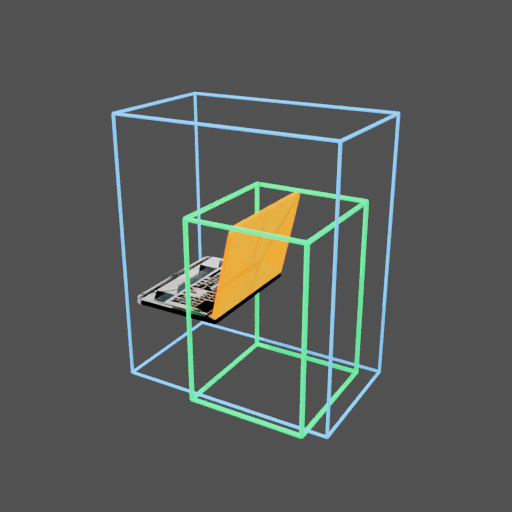
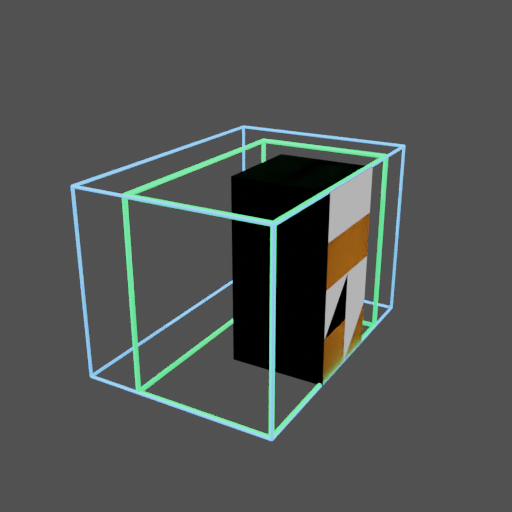
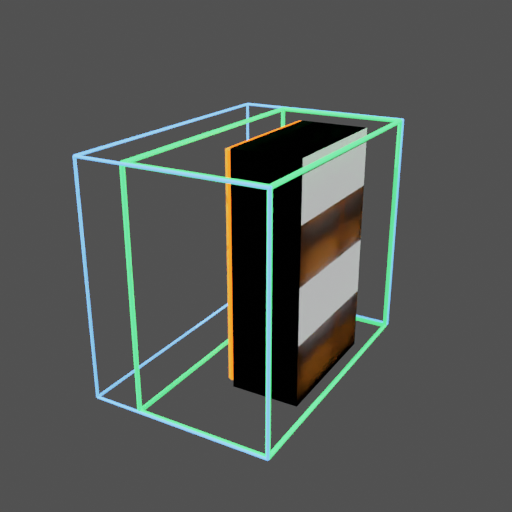
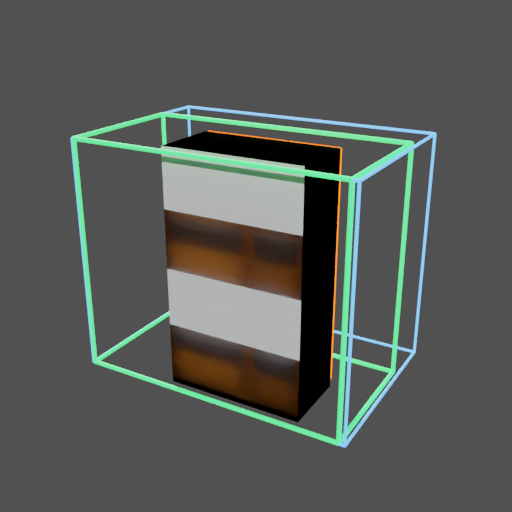
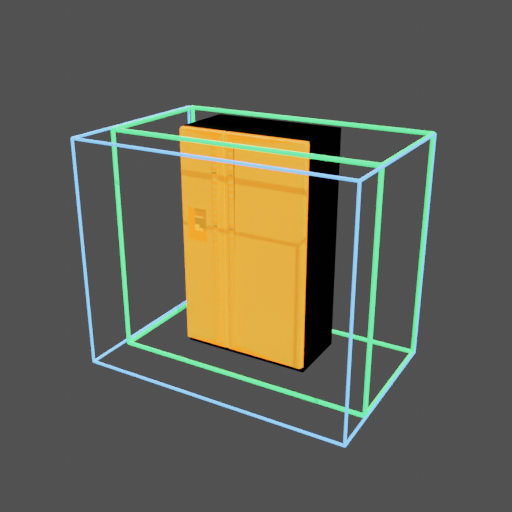
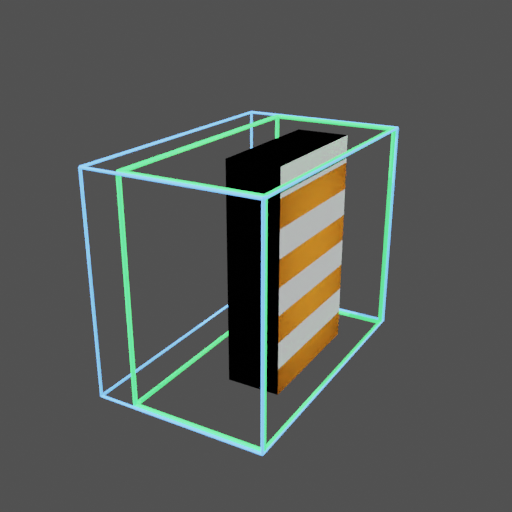
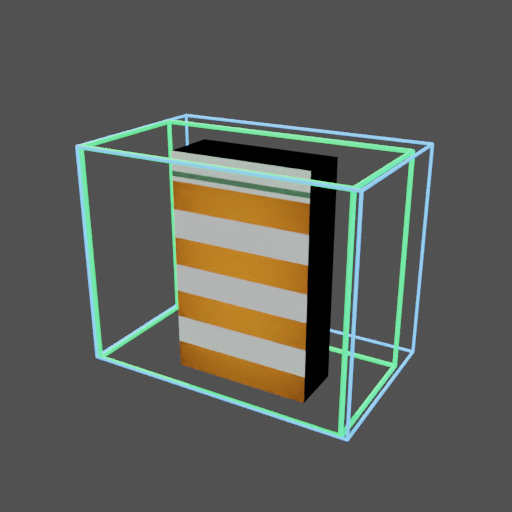
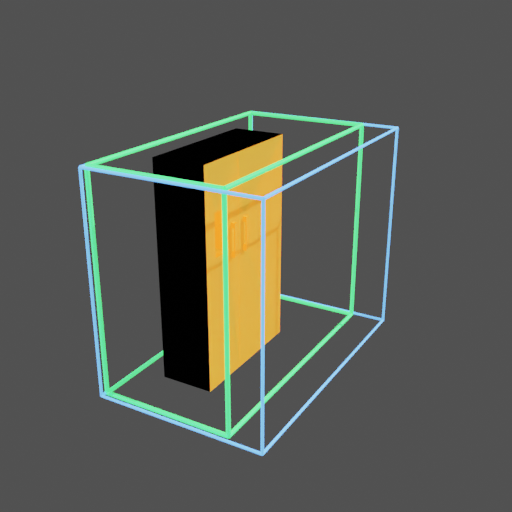
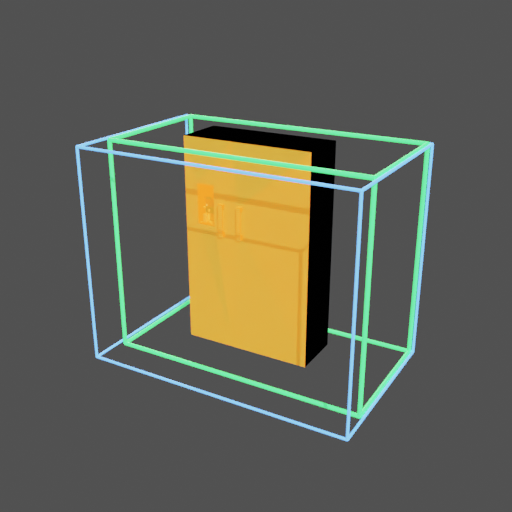
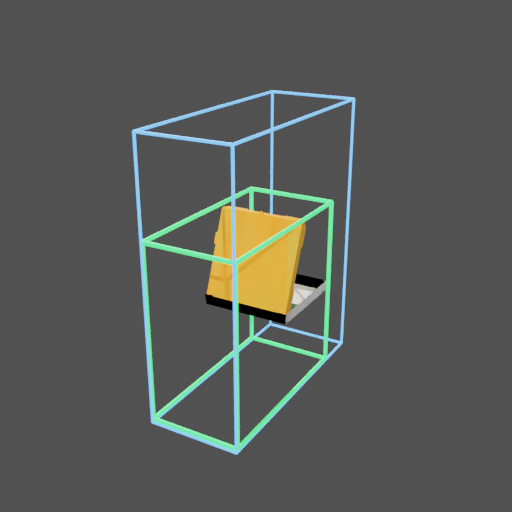
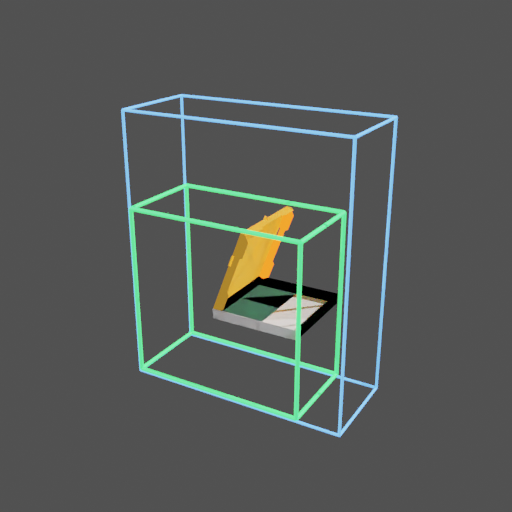
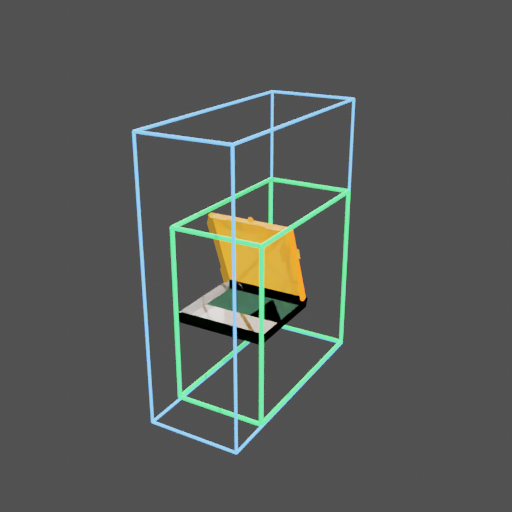
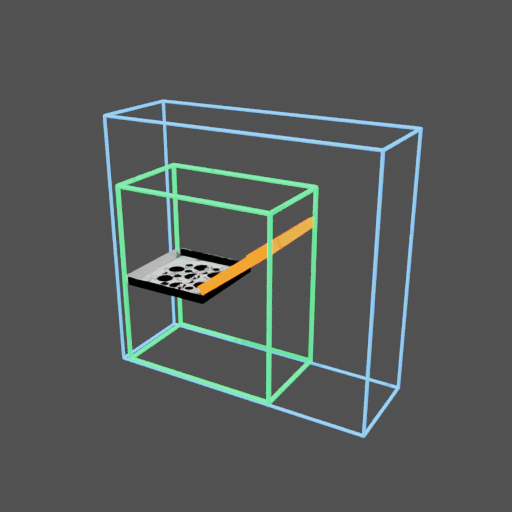
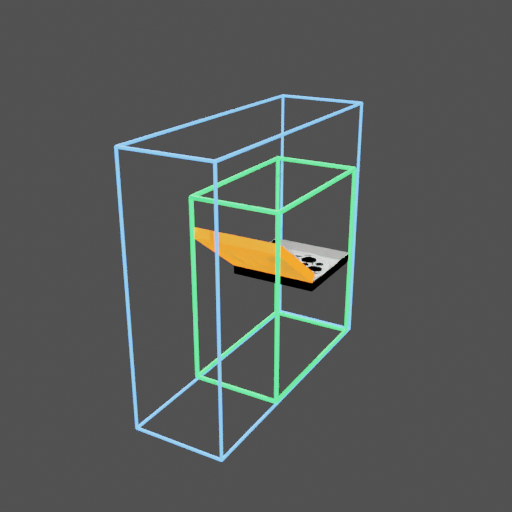
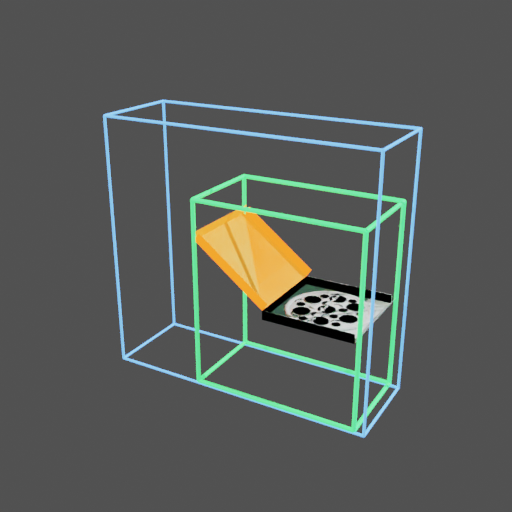
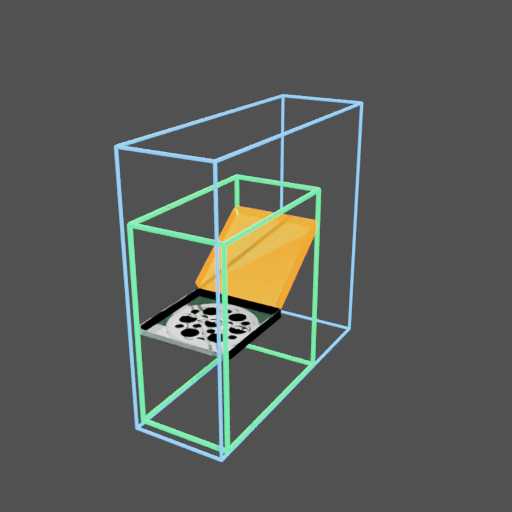
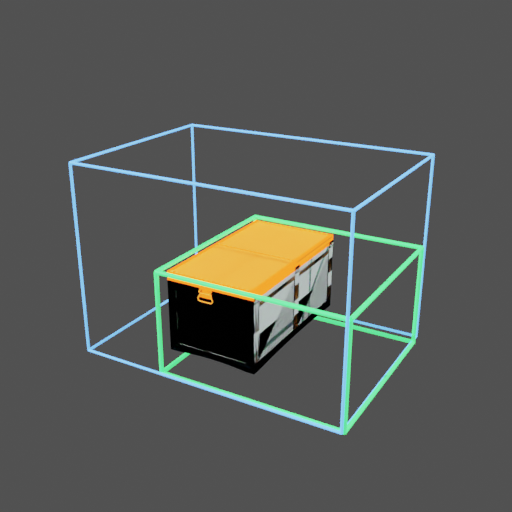
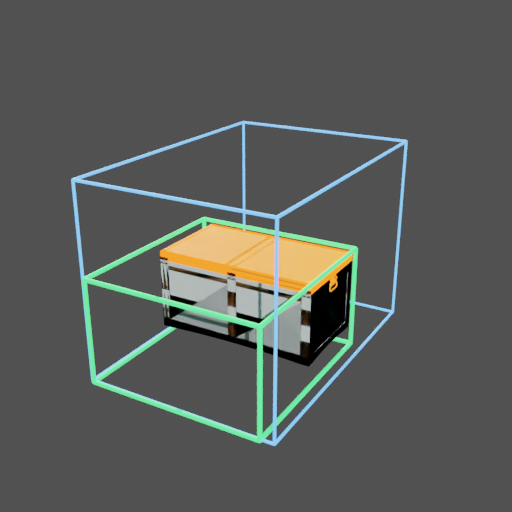
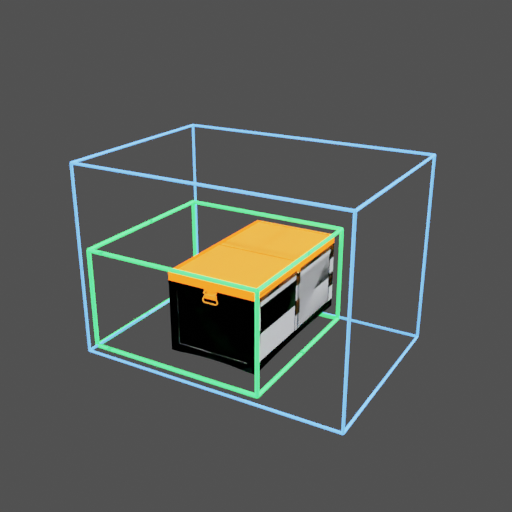
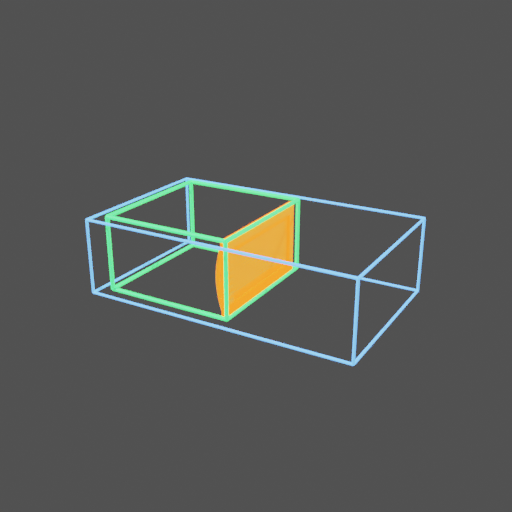
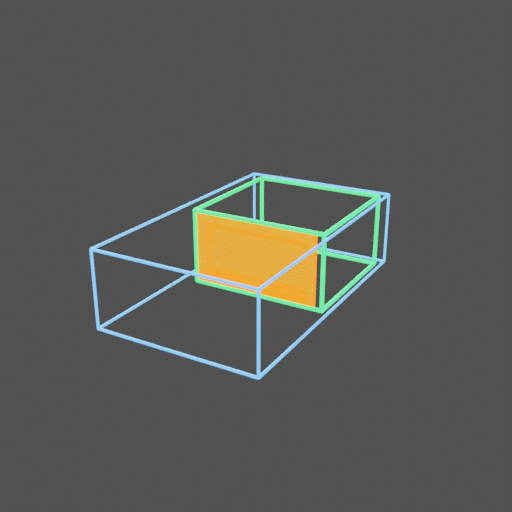
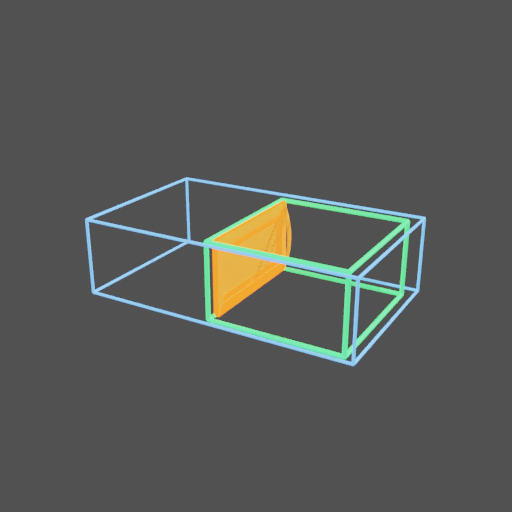
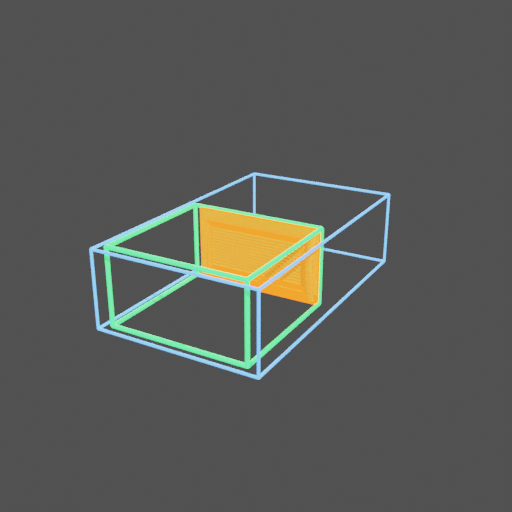
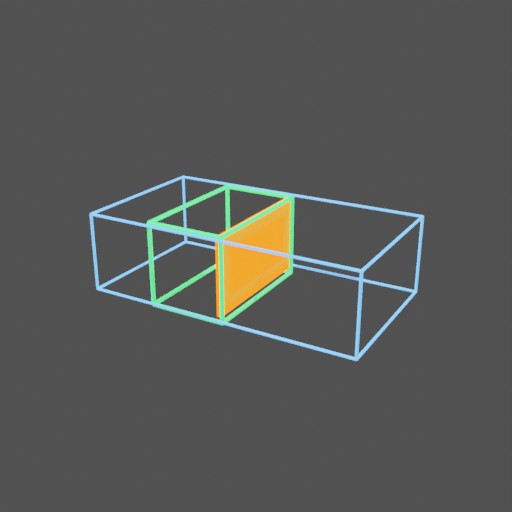
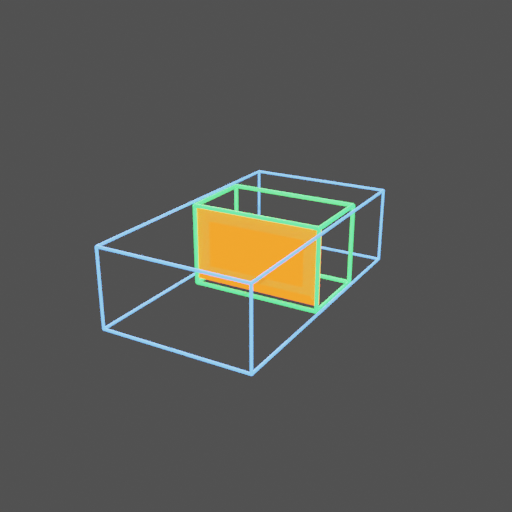
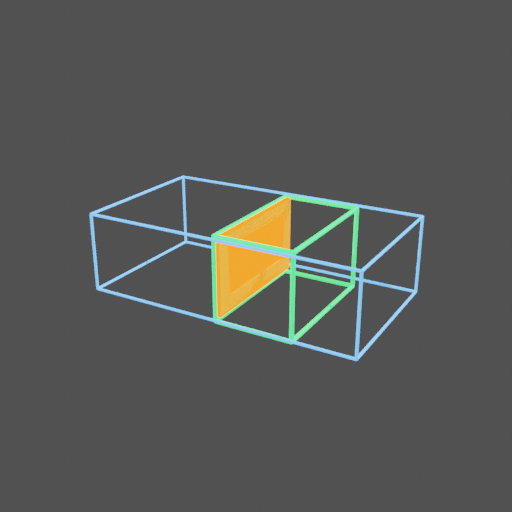
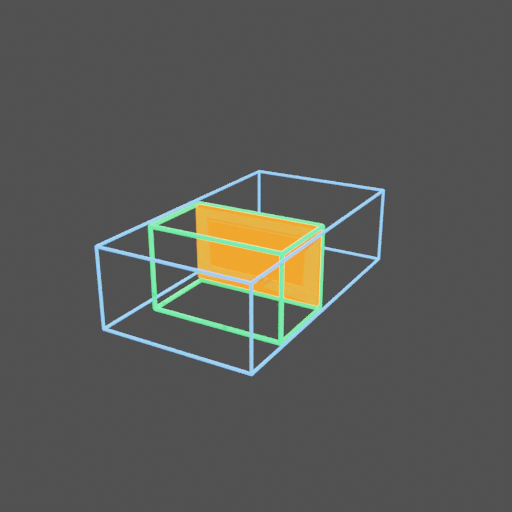
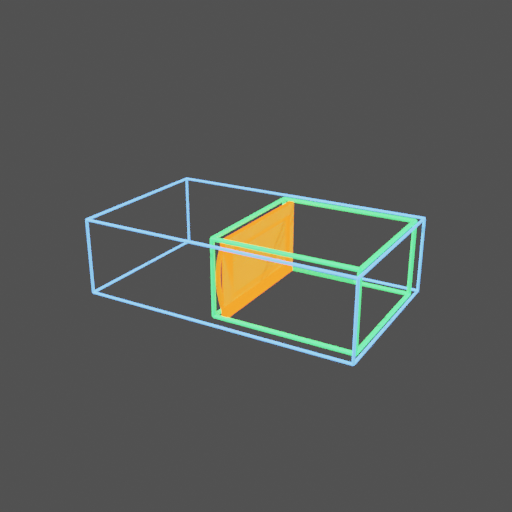
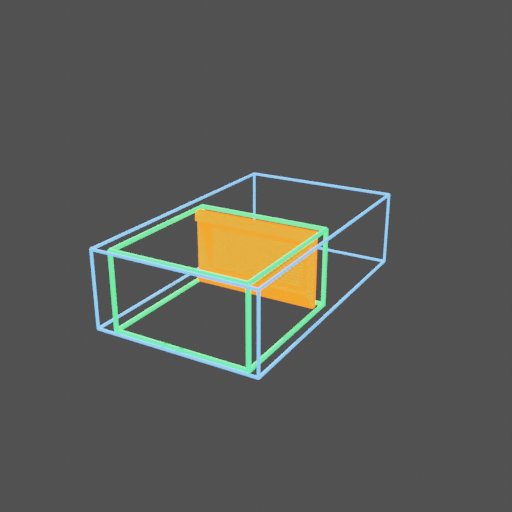
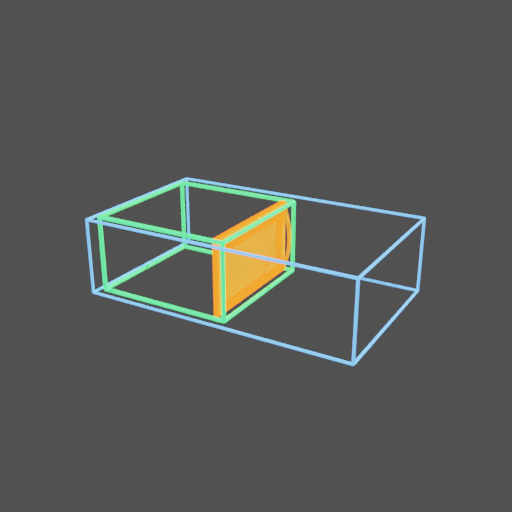
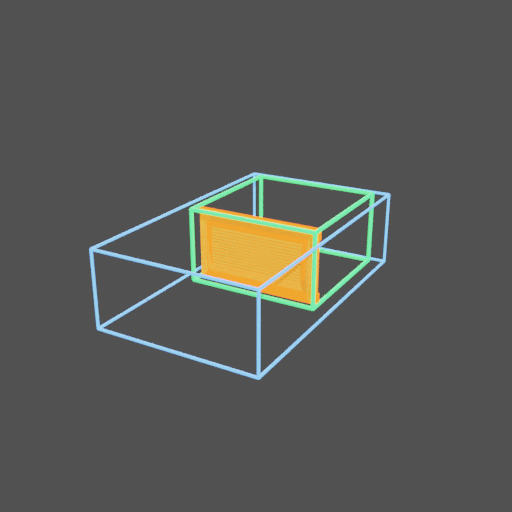
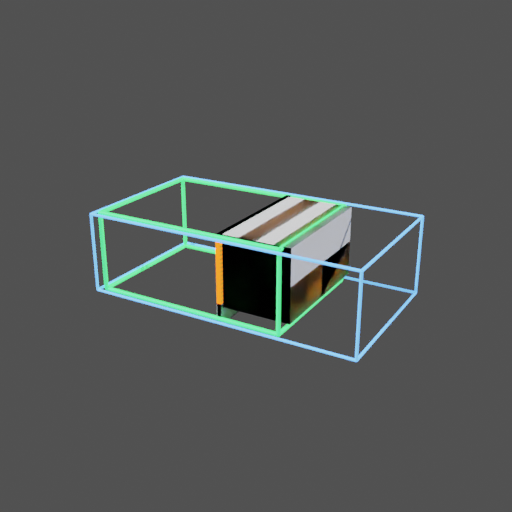
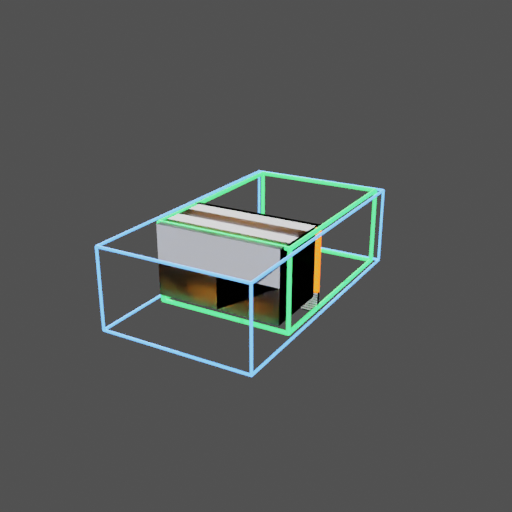
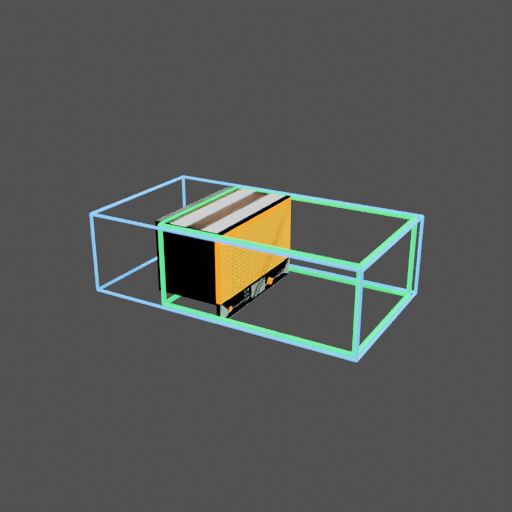
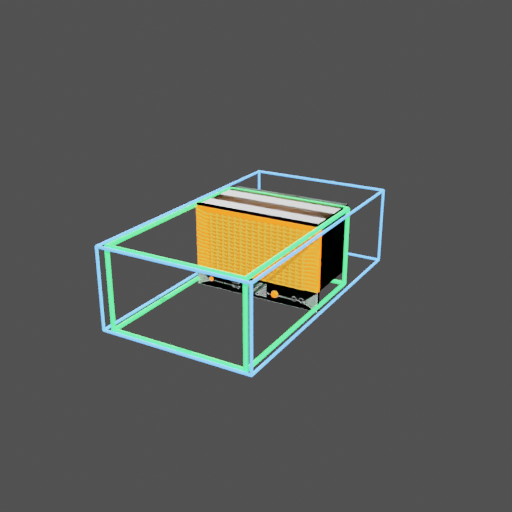
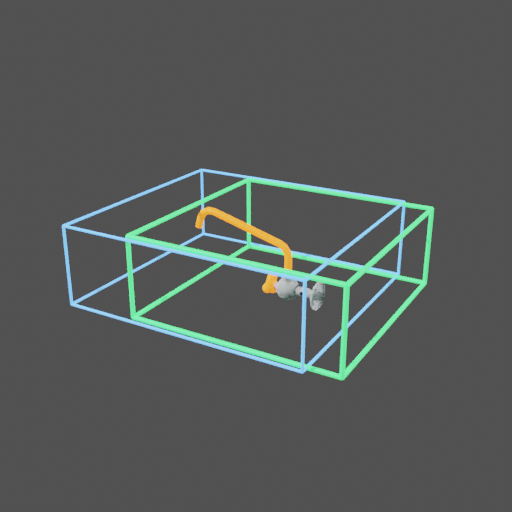
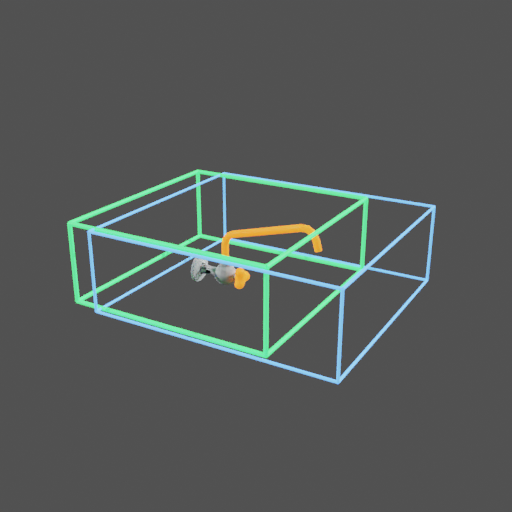
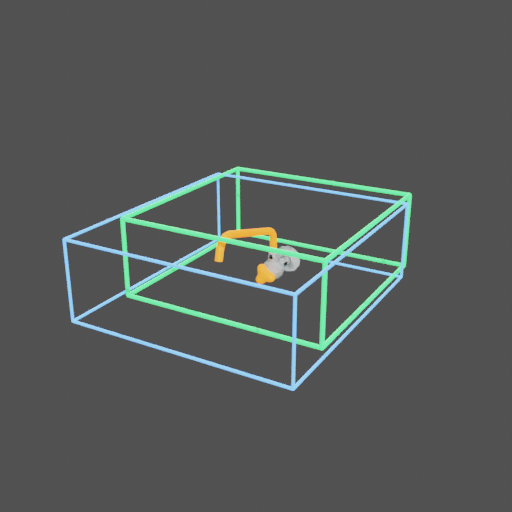
橙 = 可动部件
绿框 = GT swept-AABB(真净空)
蓝框 = U3 预测保守净空盒
判读: 蓝框包住绿框 = containment 达标; 蓝比绿大多少 = bloat 代价
E1 轴方向 (原瓶颈, 两轮独立运行)
| 方法 | 轴角误差中位 | ≤15° 占比 | 翻轴(>45°) |
|---|---|---|---|
| AA式离散程序 (run1 / run2) | 0.0° / 0.0° | 94% / 97% | 6% / 3% |
| VLM raw 轴向量 (B2v, 已证伪) | 0° | 61% | 39% |
| 纯几何 PCA 轴 (B2c) | 4.2° | 56% | — |
34/34 解析成功, 关节类型一致率 100%。残余失败=面内自由度(pivot 选边/转向正负, 两轮间随机) → 由 E3 并集吸收。VLM 自报 limit 不可靠, 必须用类别先验。
E3 保守净空 (n=20, 目标 containment≥0.9)
| 变体 | containment | bloat | c≥0.9 占比 |
|---|---|---|---|
| aaP: AA轴+先验limit (VLM的pivot/转向) | 0.70 | 0.92 | 40% |
| U2: + 两转向并集 | 0.92 | 1.46 | 75% |
| U3: + 4铰边×2转向并集 (交付) | 0.97 | 2.07 | 85% |
| 静止 bbox (下界) | 0.23 | — | 0% |
诚实声明: 样本为各类运动幅度最大的 4 件(expand>1.5), 非随机抽样; Faucet 两件 c=0.85(手柄轴固有歧义); bloat≈2 是保守性的显式代价, 可退 U2 档(c≈0.9, bloat≈1.45)。渲染为真 Blender CYCLES。
逐件叠加可视化 (20 件)
Laptop 10040
U3: containment 1.0 · bloat 2.85
并集前 aaP: c=0.66 · 天花板 B2b=0.63
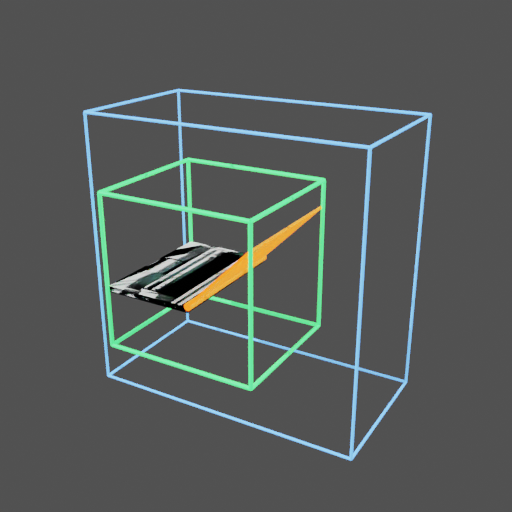
l1 rev 轴err=0.0°
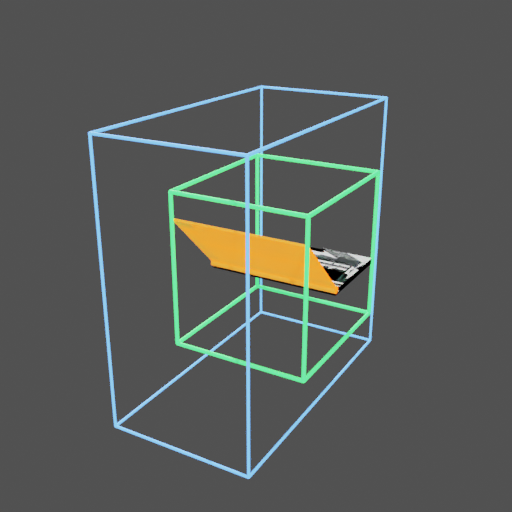
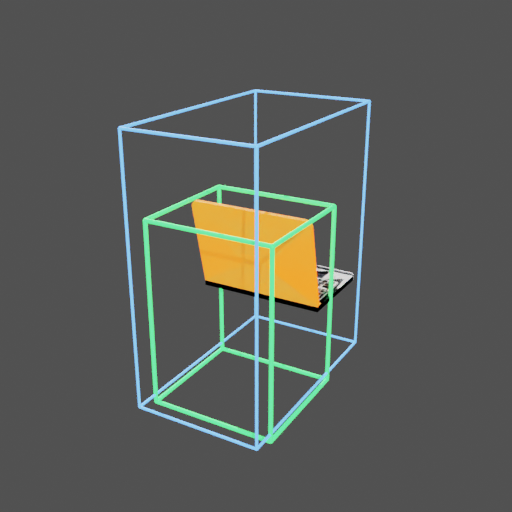
Laptop 10243
U3: containment 1.0 · bloat 2.72
并集前 aaP: c=0.72 · 天花板 B2b=0.688
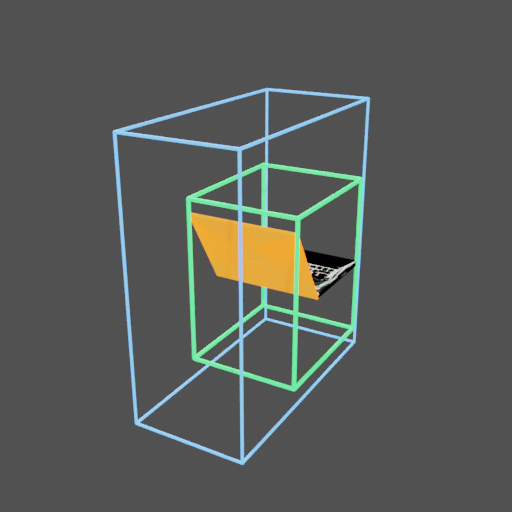
l1 rev 轴err=0.0°
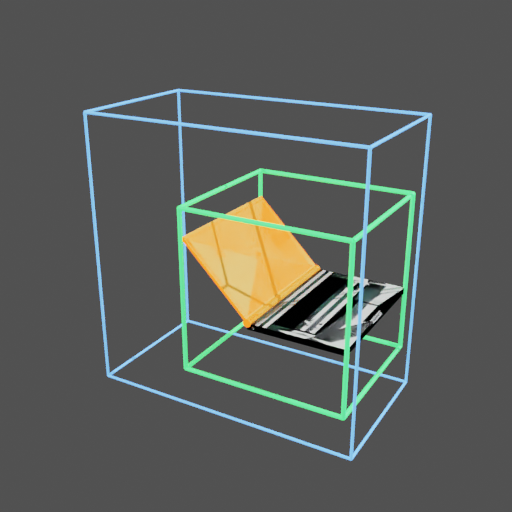
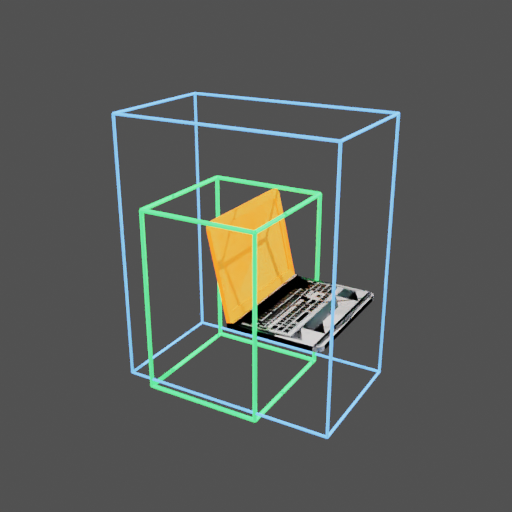
Laptop 10356
U3: containment 1.0 · bloat 2.71
并集前 aaP: c=0.73 · 天花板 B2b=0.725
l0 rev 轴err=0.0°
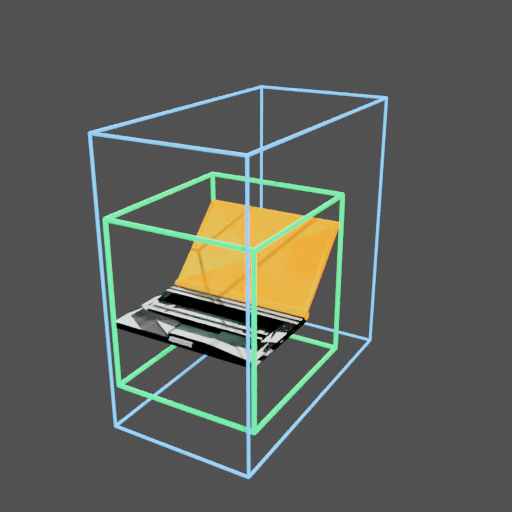
Laptop 9996
U3: containment 0.96 · bloat 2.58
并集前 aaP: c=0.32 · 天花板 B2b=0.772
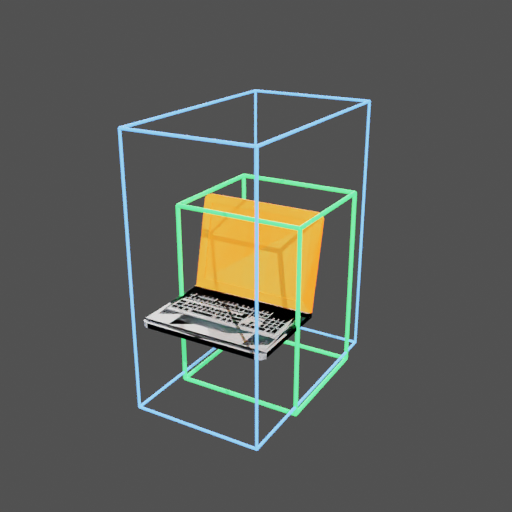
l0 rev 轴err=0.0°
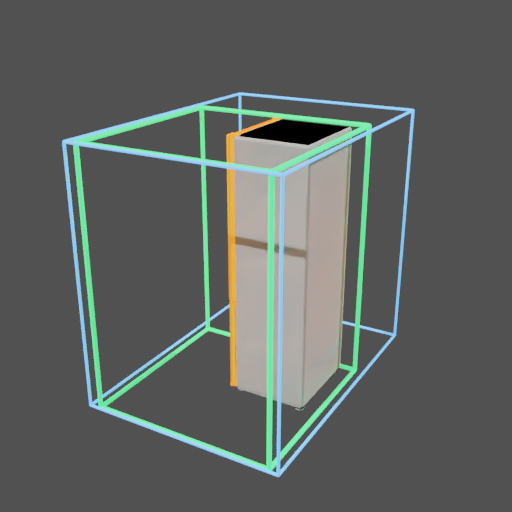
Refrigerator 10068
U3: containment 1.0 · bloat 1.73
并集前 aaP: c=0.4 · 天花板 B2b=0.984
l1 rev 轴err=0.0°l2 rev 轴err=0.0°
Refrigerator 10347
U3: containment 1.0 · bloat 1.69
并集前 aaP: c=0.6 · 天花板 B2b=0.993
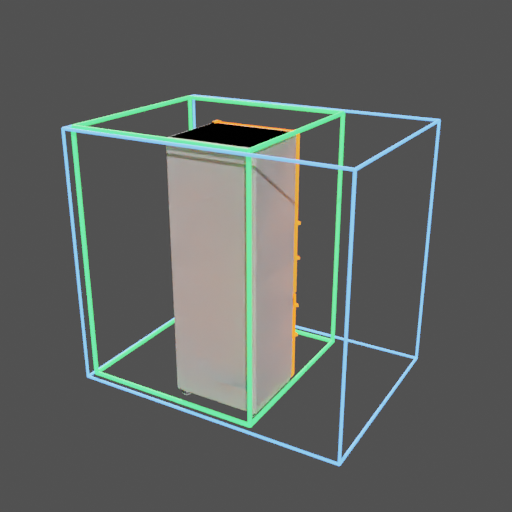
l0 rev 轴err=0.0°l1 rev 轴err=0.0°
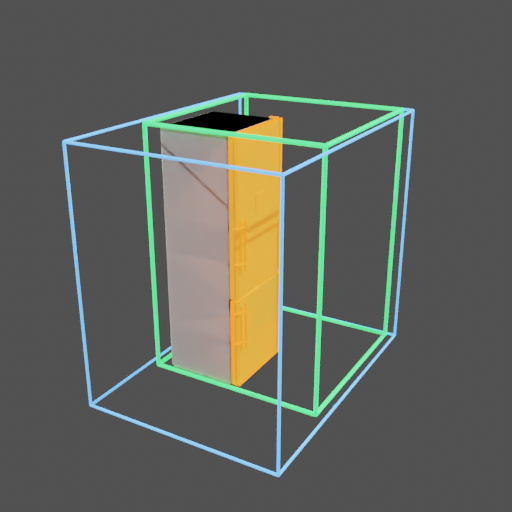
Refrigerator 10655
U3: containment 1.0 · bloat 1.41
并集前 aaP: c=0.41 · 天花板 B2b=0.991
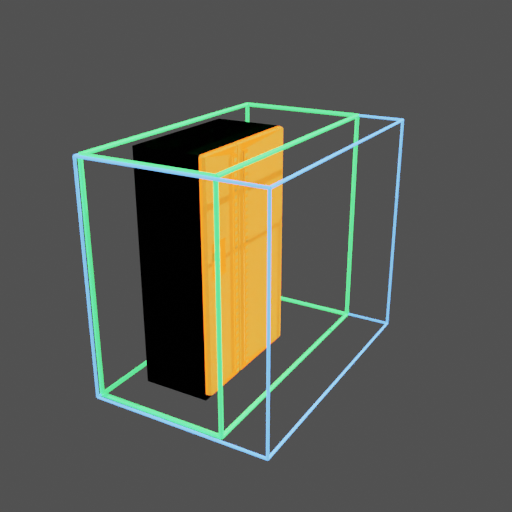
l1 rev 轴err=0.0°l2 rev 轴err=0.0°
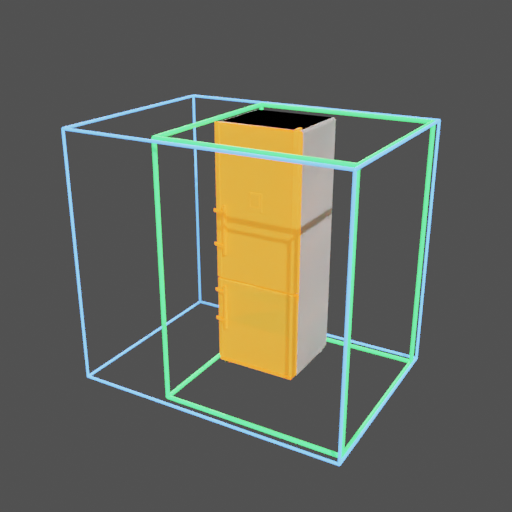
Refrigerator 10685
U3: containment 1.0 · bloat 1.33
并集前 aaP: c=0.62 · 天花板 B2b=0.986
l1 rev 轴err=0.0°l2 rev 轴err=0.0°
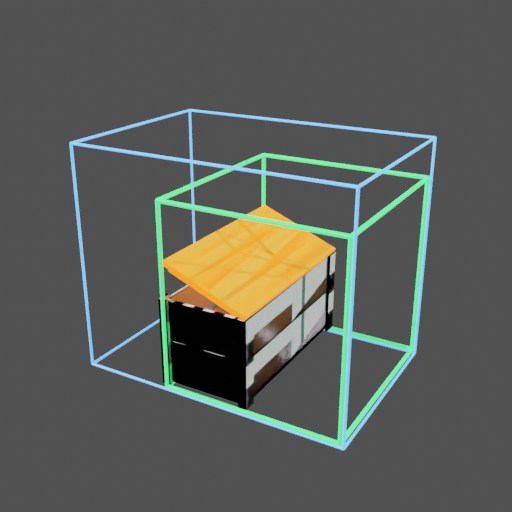
Box 100191
U3: containment 1.0 · bloat 1.94
并集前 aaP: c=1.0 · 天花板 B2b=0.995
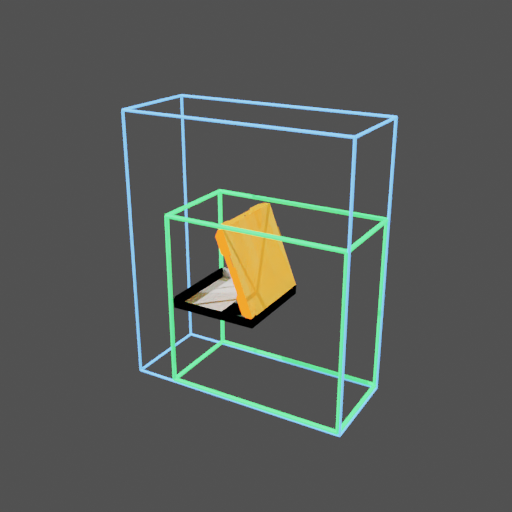
l0 rev 轴err=0.0°
Box 100671
U3: containment 1.0 · bloat 1.9
并集前 aaP: c=1.0 · 天花板 B2b=0.99
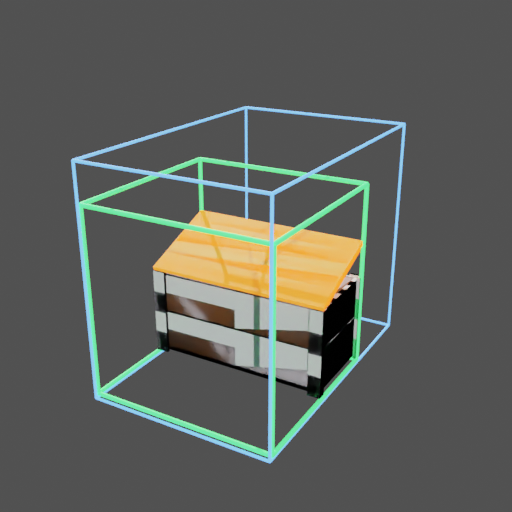
l0 rev 轴err=0.0°
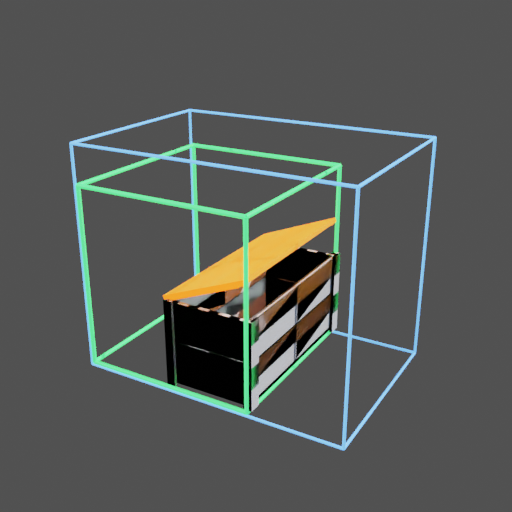
Box 100685
U3: containment 1.0 · bloat 2.23
并集前 aaP: c=1.0 · 天花板 B2b=0.993
l0 rev 轴err=0.0°
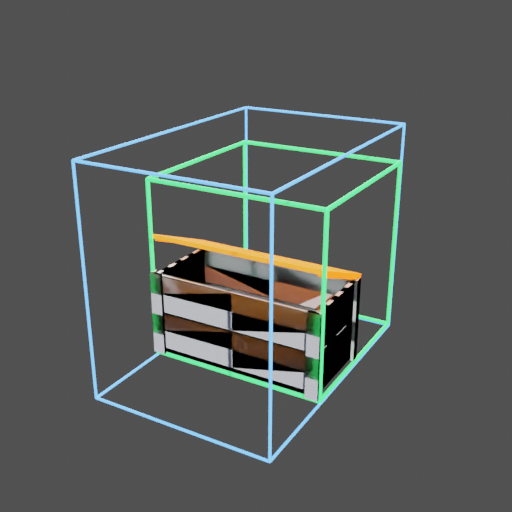
Box 48492
U3: containment 0.99 · bloat 2.97
并集前 aaP: c=0.44 · 天花板 B2b=0.571
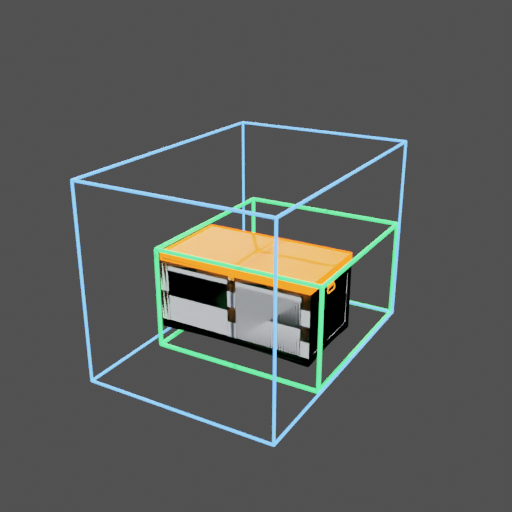
l0 rev 轴err=0.0°l1 rev 轴err=0.0°l2 rev 轴err=0.0°l3 rev 轴err=0.0°
Microwave 7221
U3: containment 1.0 · bloat 2.41
并集前 aaP: c=0.98 · 天花板 B2b=0.981
l0 rev 轴err=0.0°
Microwave 7306
U3: containment 0.94 · bloat 3.69
并集前 aaP: c=0.93 · 天花板 B2b=0.982
l0 rev 轴err=90.0°
Microwave 7320
U3: containment 1.0 · bloat 2.4
并集前 aaP: c=0.94 · 天花板 B2b=0.979
l0 rev 轴err=0.0°
Microwave 7349
U3: containment 1.0 · bloat 1.57
并集前 aaP: c=1.0 · 天花板 B2b=0.986
l0 con 轴err=0.0°l1 rev 轴err=0.0°l2 con 轴err=0.0°l3 pri 轴err=0.0°
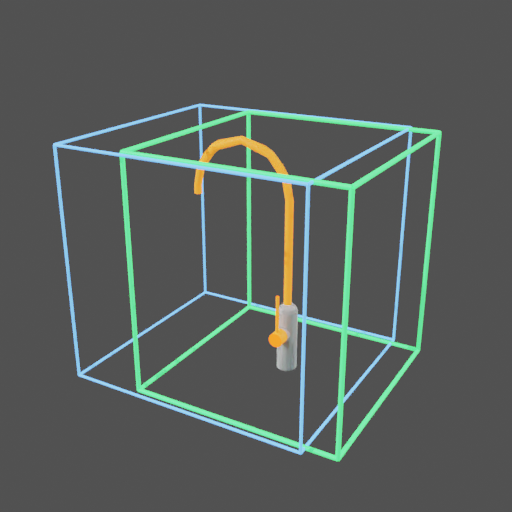
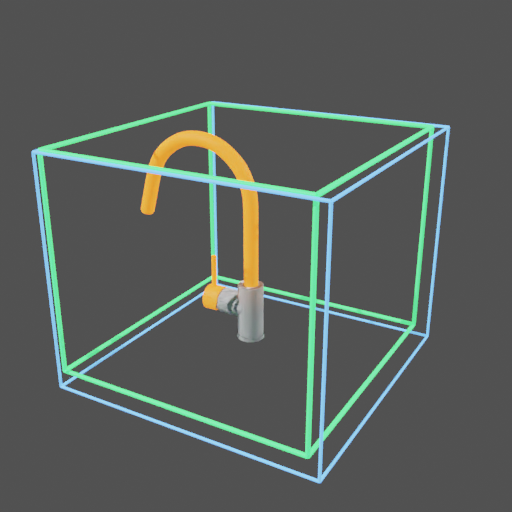
Faucet 1596
U3: containment 0.88 · bloat 1.47
并集前 aaP: c=0.55 · 天花板 B2b=0.901
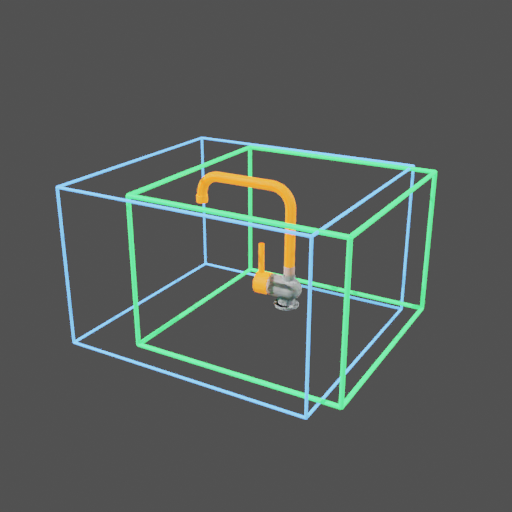
l0 rev 轴err=0.0°l2 rev 轴err=0.0°
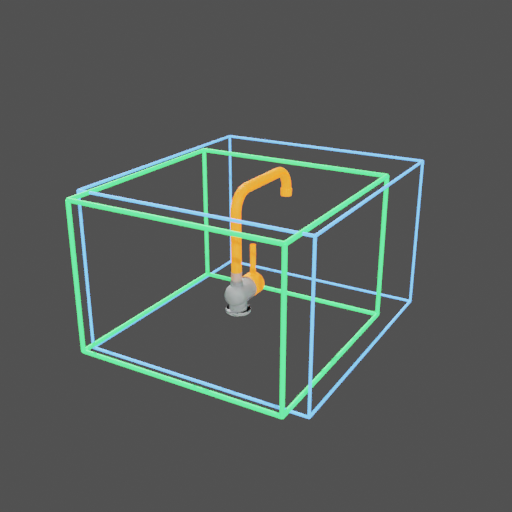
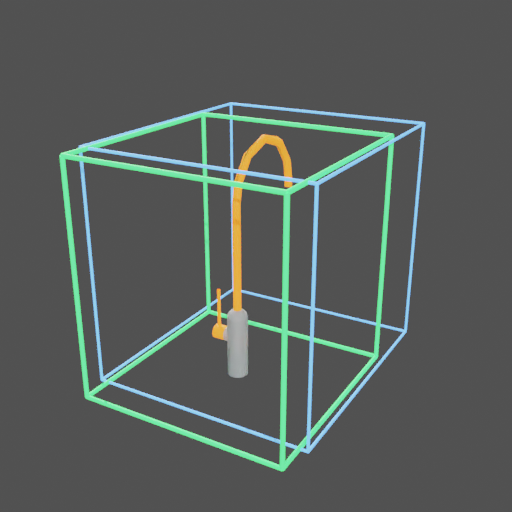
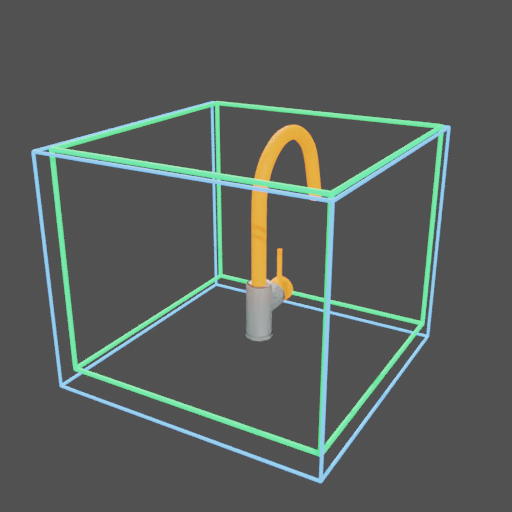
Faucet 1785
U3: containment 0.85 · bloat 1.27
并集前 aaP: c=0.47 · 天花板 B2b=1.0
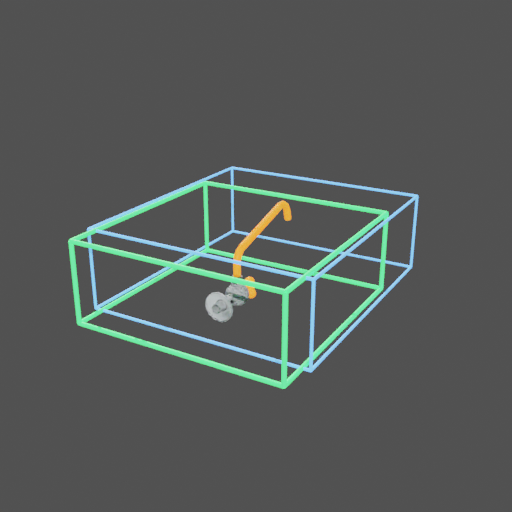
l0 con 轴err=0.0°l2 rev 轴err=0.0°
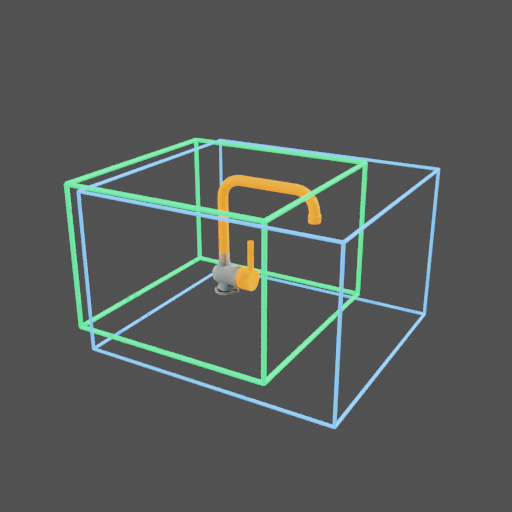
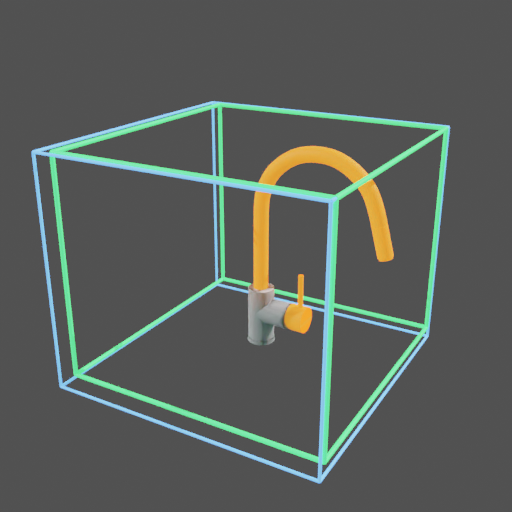
Faucet 1885
U3: containment 0.85 · bloat 1.28
并集前 aaP: c=0.37 · 天花板 B2b=0.928
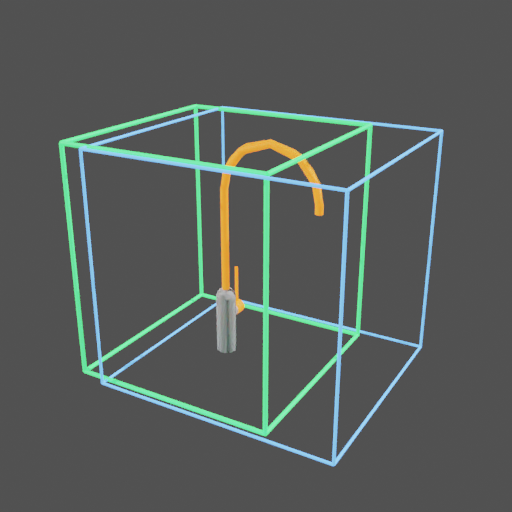
l0 rev 轴err=0.0°l1 rev 轴err=0.0°
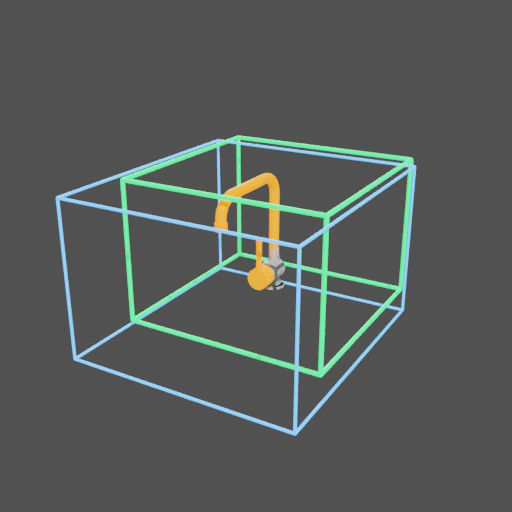
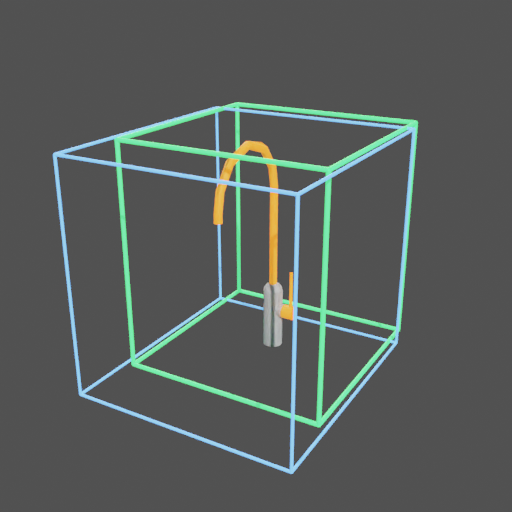
Faucet 1886
U3: containment 1.0 · bloat 1.18
并集前 aaP: c=0.92 · 天花板 B2b=0.922
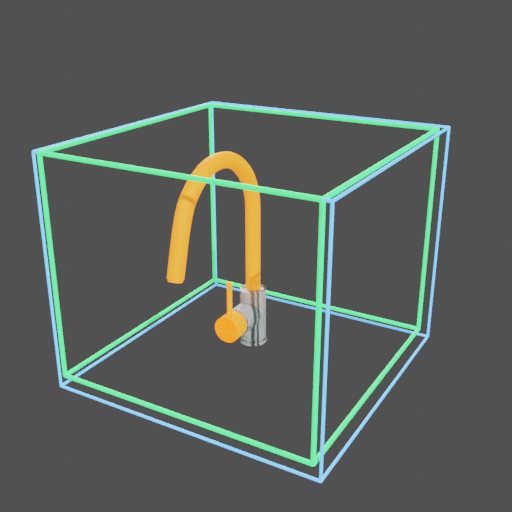
l0 rev 轴err=0.0°l2 con 轴err=0.0°
产物: clearance_retrieval_pilot_20260609/ (route3_aa_pilot.py / route3b_union.py / ROUTE3_E1_E3_RESULTS_20260609.md)。 本页为评测样本可视化, 非 canonical 数据。